RobotStudio中Home点的创建(一)
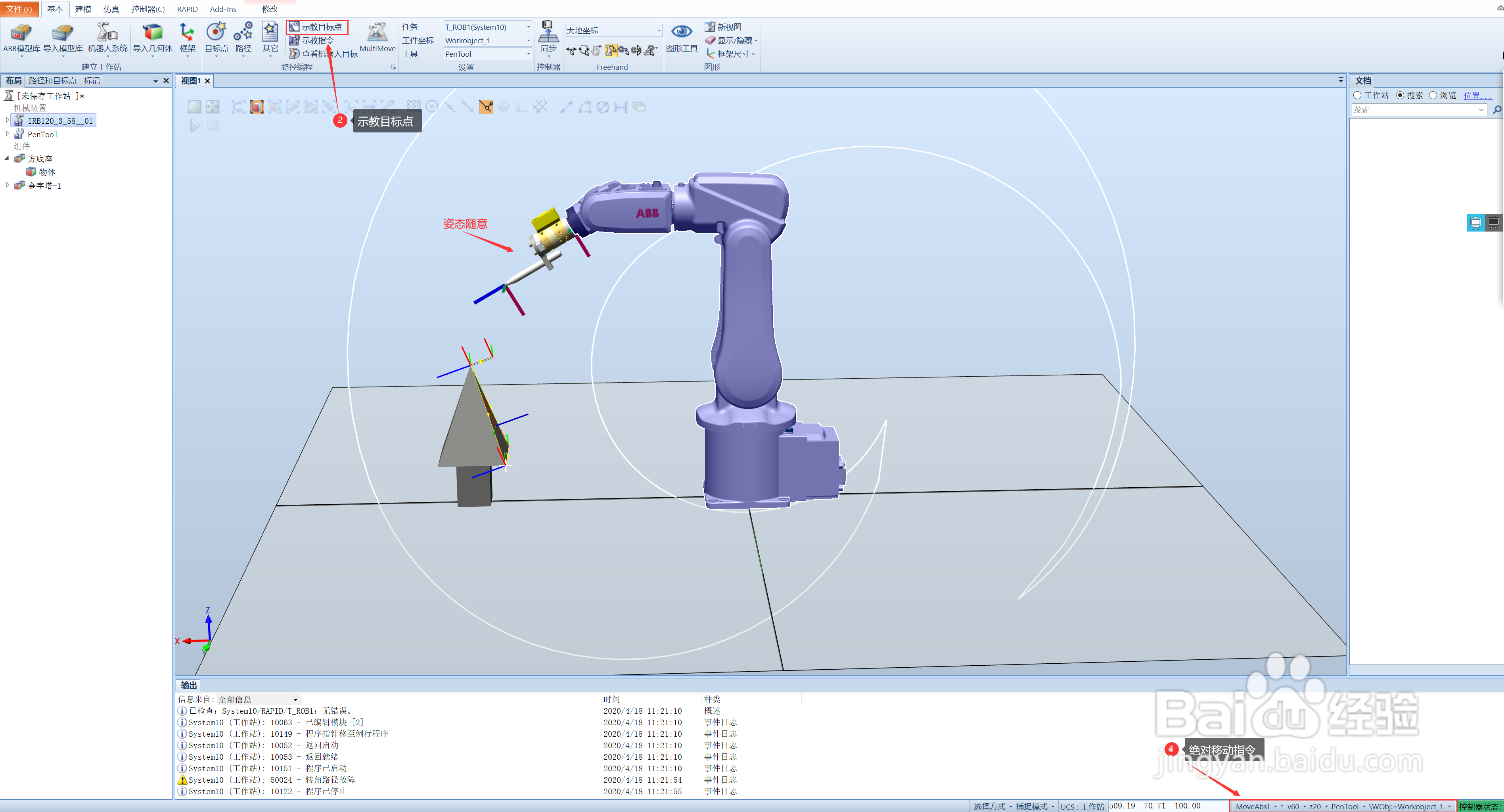
1、将右下指令模板调至绝对关节移动MoveAbsj指令,调整好相应参数后,当前位置示教目标点。
2、查看创建的目标点Joint Target_1,【基本】—【路径和目标点】导航栏中可以查看刚刚创建的关节型目标点。

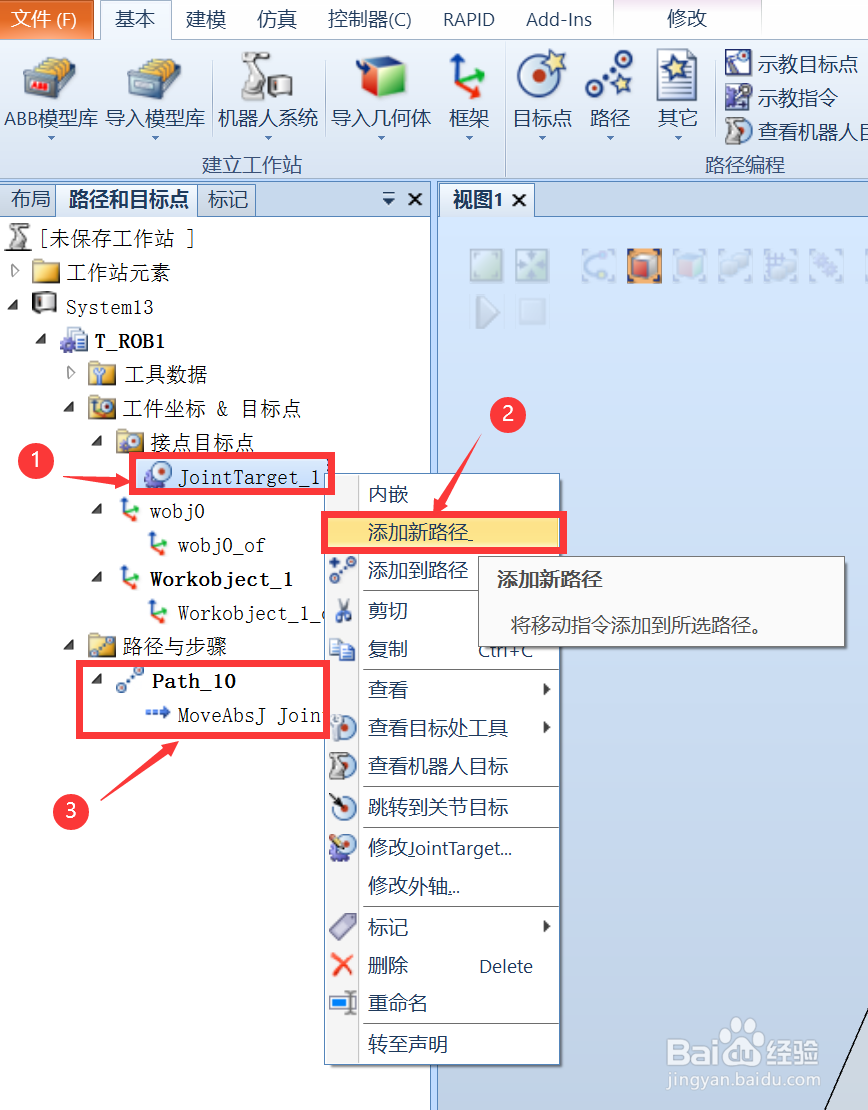
3、创建路径,右键JointTarget点,点击【添加新路径】,出现Path_10路径和对应喋碾翡疼模板的指令程序。
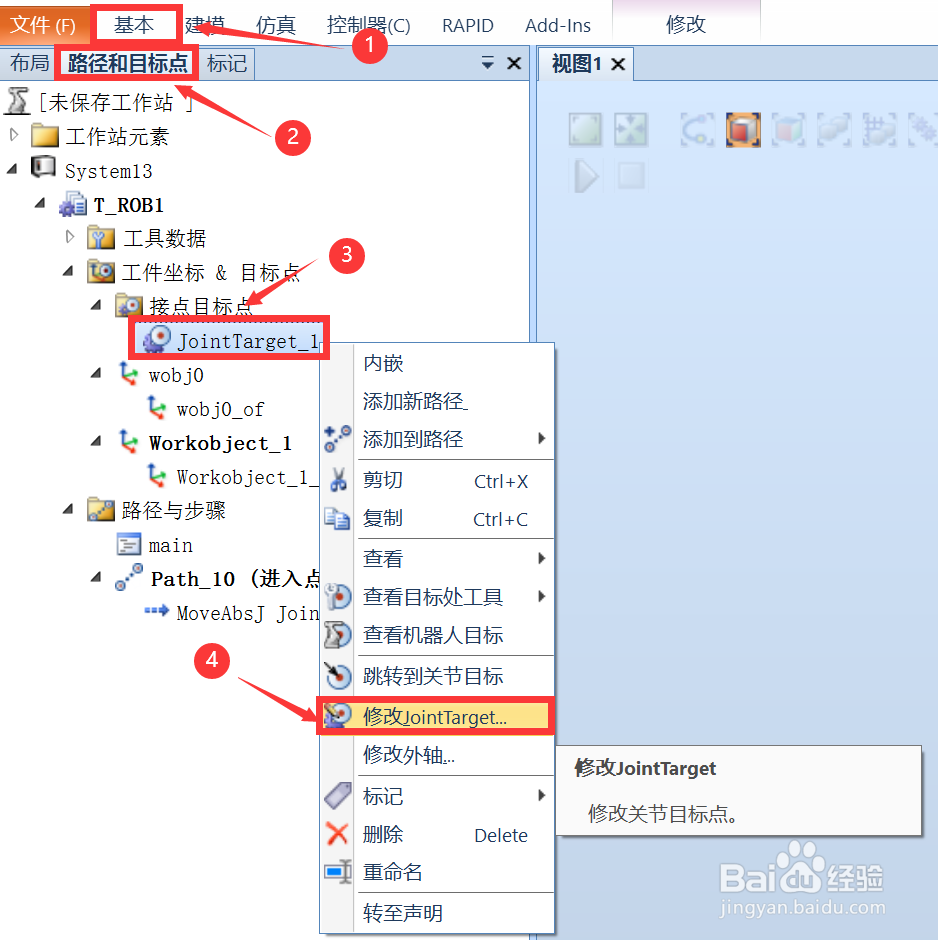
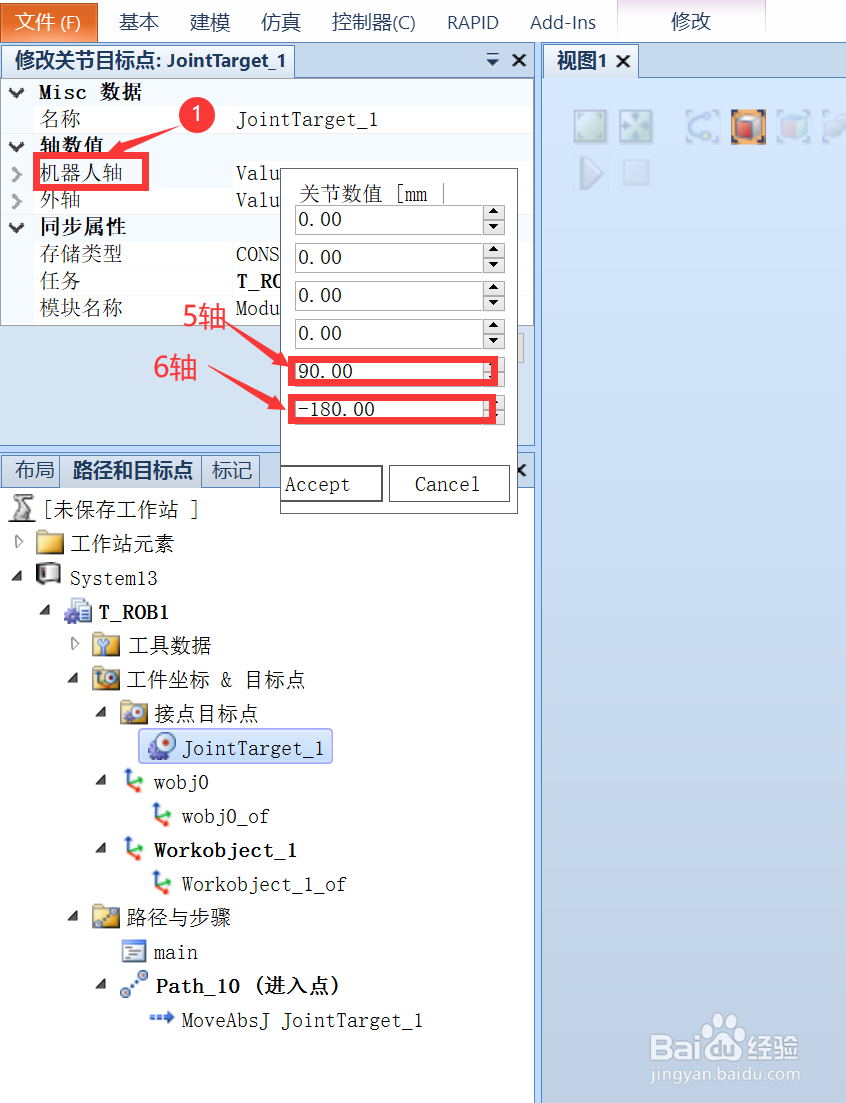
4、右键单击【Joint Target_1】目标点,【修改Joint Target_1】目标点参数。
5、同步到Rapid。

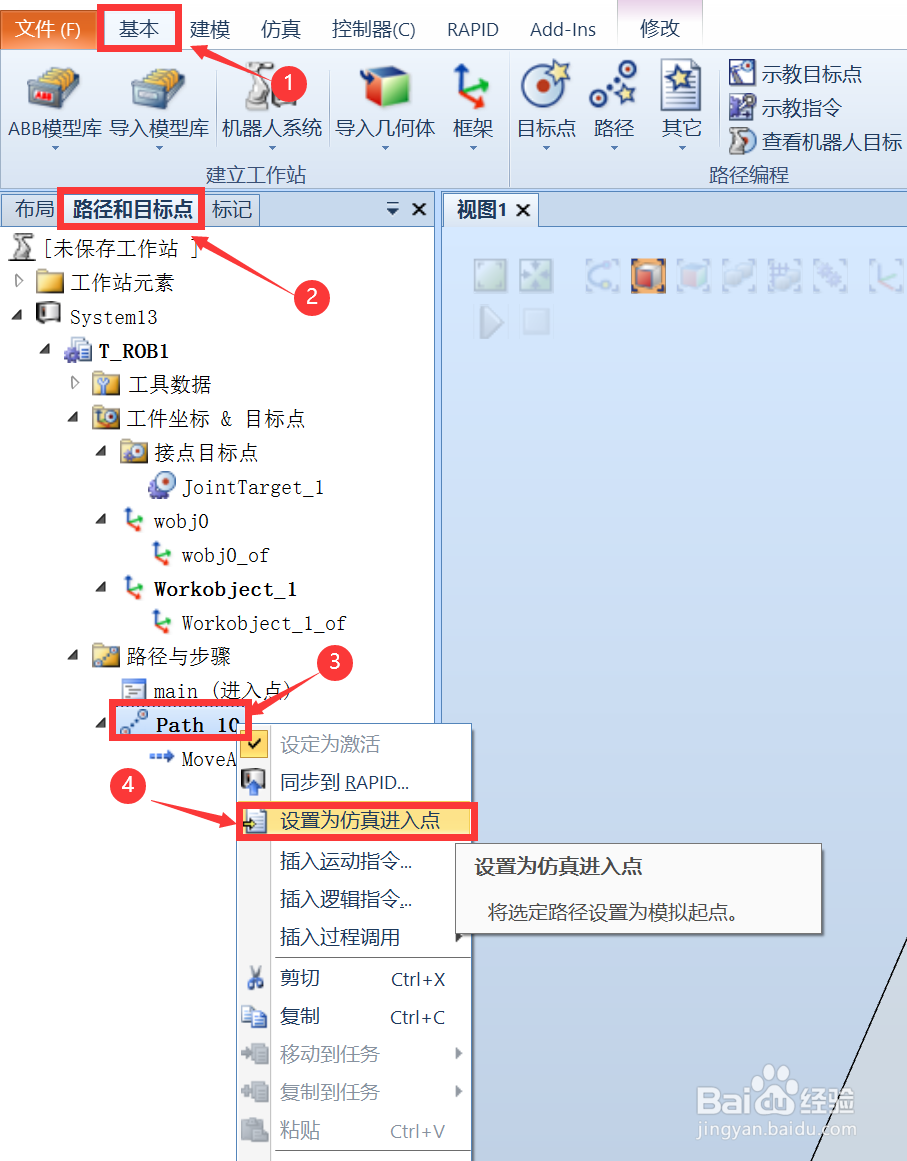
6、设置仿真进入点。【基本】—【路径和目标点】—[鼠标右键Path_10]—【设置为仿真进入点】
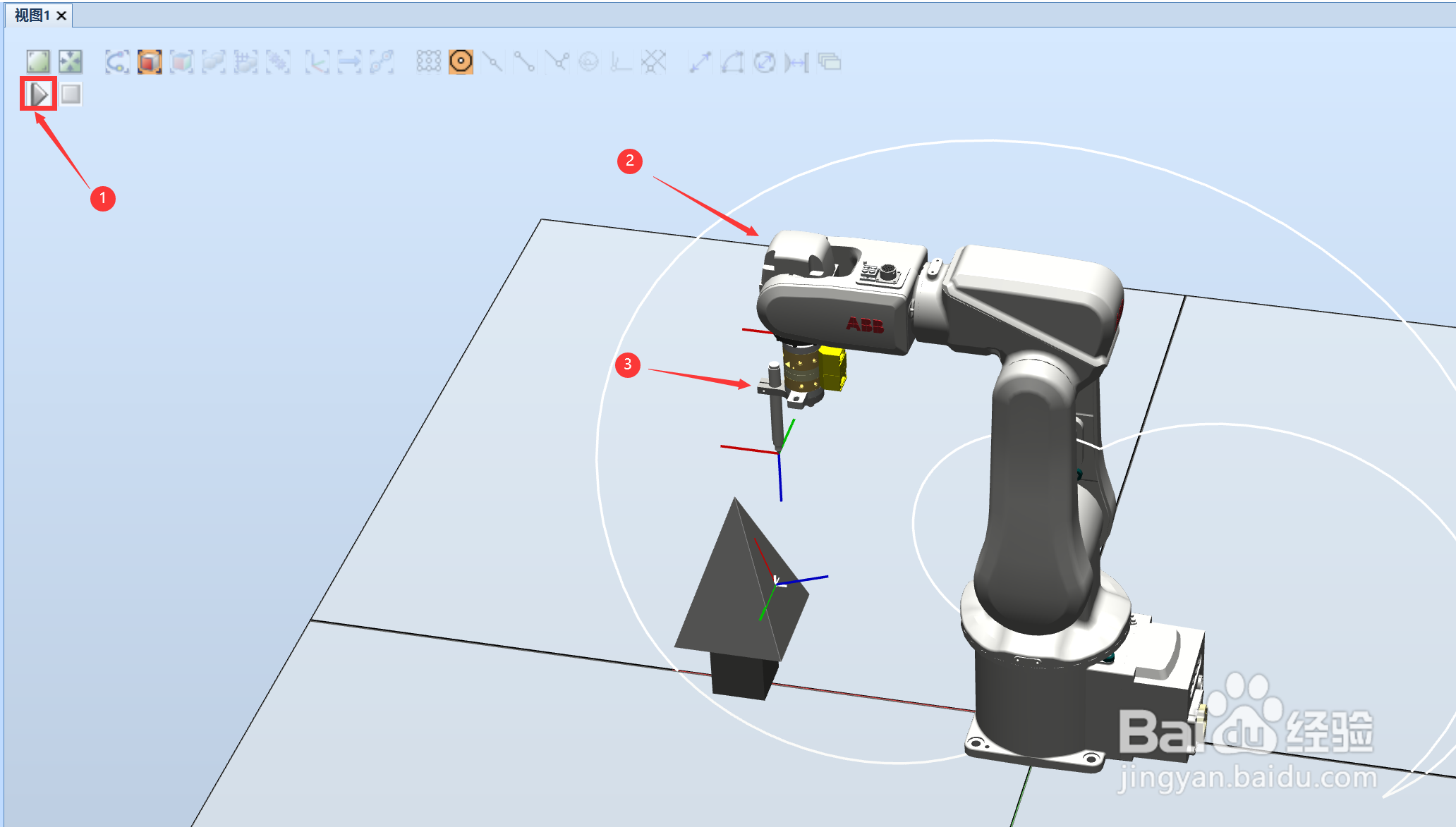
7、按工作窗口【仿真】,机器人将运行到理想位置Home点了。注意机器人5、6关节位置的变化。
声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。
阅读量:30
阅读量:83
阅读量:49
阅读量:38
阅读量:26