EtherCAT运动控制卡开发教程之python
众所周知,P烤恤鹇灭ython作为一门新兴开发语言,具有非常完善的基础代码库,更注重实用,同时代码可读极强,编写完程序即可直接运行,被越来越多的人广泛将它用于机器视觉和自动化控制。
今天正运动技术与大家分享一下运动控制卡应用开发教程之Python。
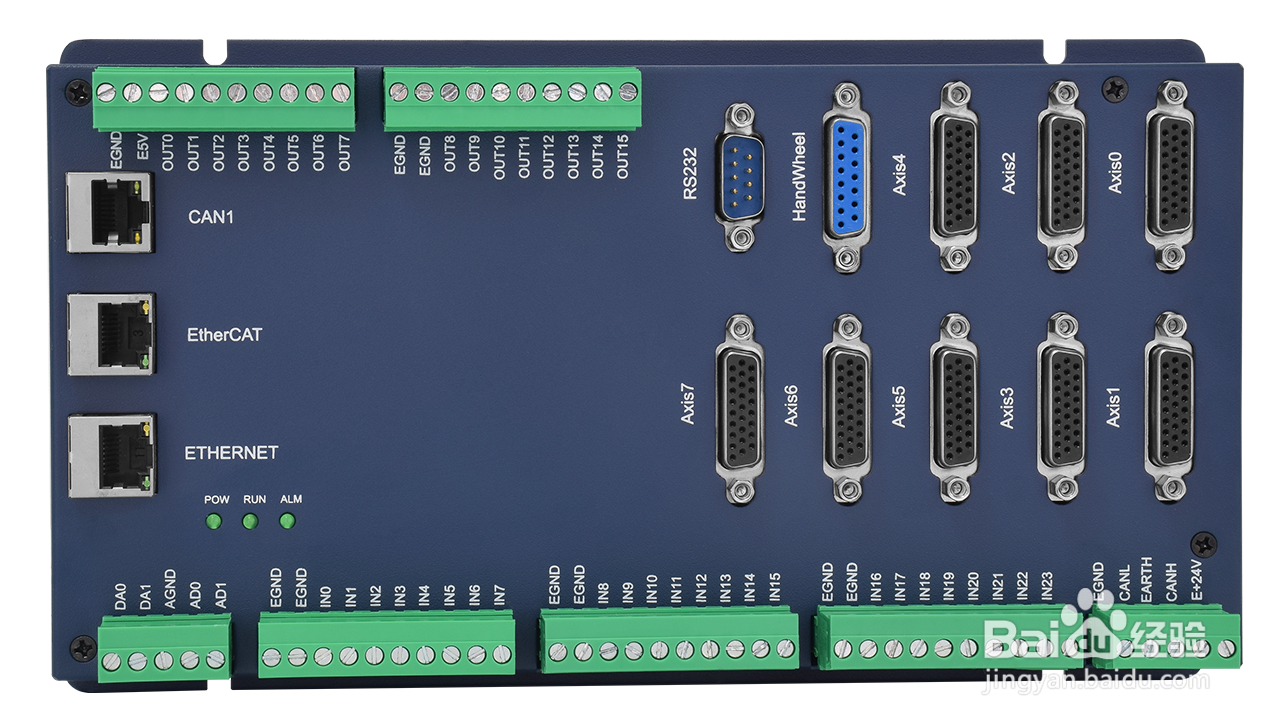
一、ECI2828硬件介绍
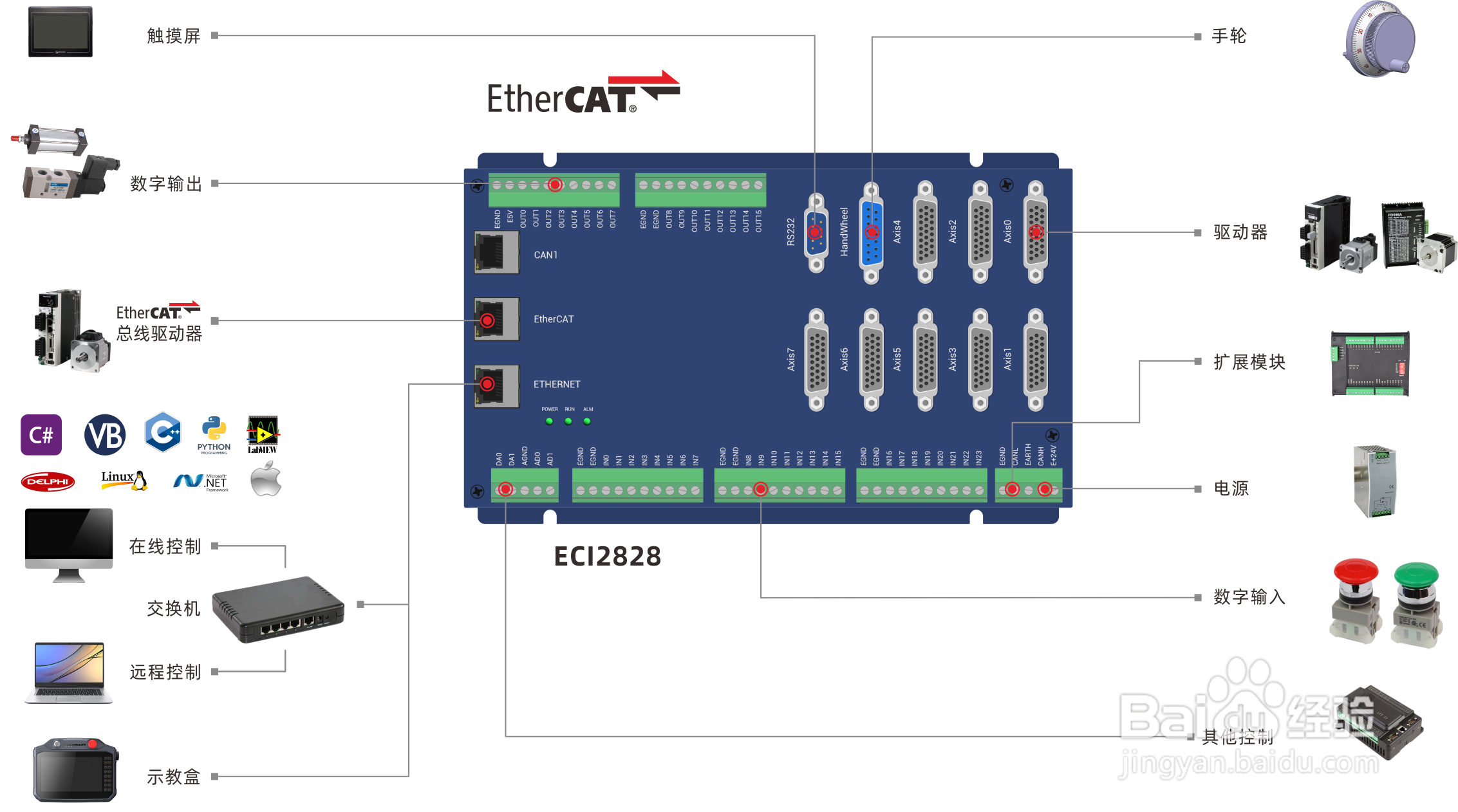
ECI2828 经济型多轴运动控制卡是一款总线型,模块化的网络型运动控制卡。控制卡本身最多支持 8 轴、可扩展至 16 轴的运动控制、用以实现直线插补、任意圆弧插补、空间圆弧、螺旋插补、电子凸轮、电子齿轮、同步跟随、虚拟轴等简单的轨迹控制需求;采用优化的网络通讯协议可以实现实时的运动控制。
ECI2828 经济型多轴运动控制卡可用于电子半导体设备(检测类设备、组装类设备、锁附类设备、焊锡机)、点胶设备和流水线等 16 轴以内脉冲应用场合。
ECI2828系列运动控制卡的应用程序可以使用 VC、VB、VS、C++以及C#等软件来开发,程序运行时需要动态库 zmotion.dll。调试时可以把ZDevelop软件同时连接到控制器,从而方便调试,方便观察。
二、Python语言开发流程
Python语言的使用环境
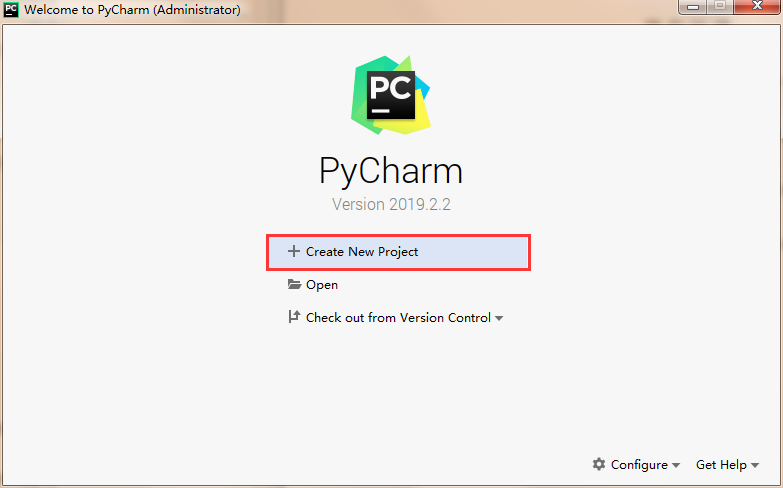
1、新建项目。
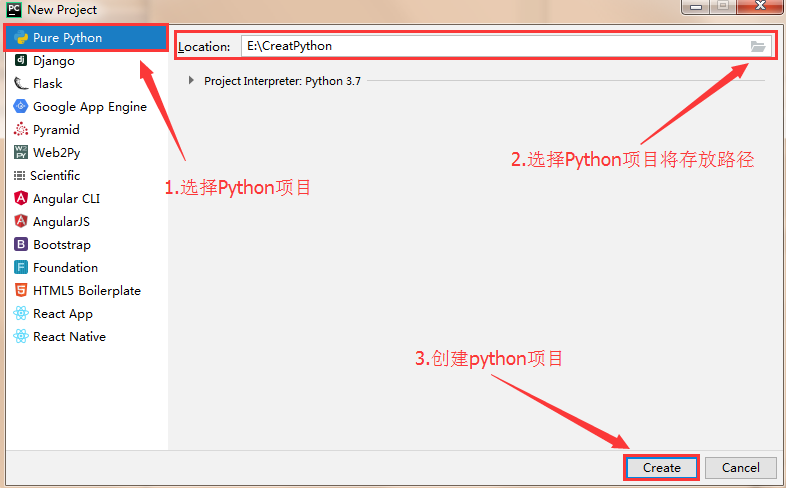
打开Pycharm软件进行操作,点击Create New Project新建项目。
2、设置Python项目存放路径。
选择Python项目→选择Python项目将存放的路径→创建Python项目。
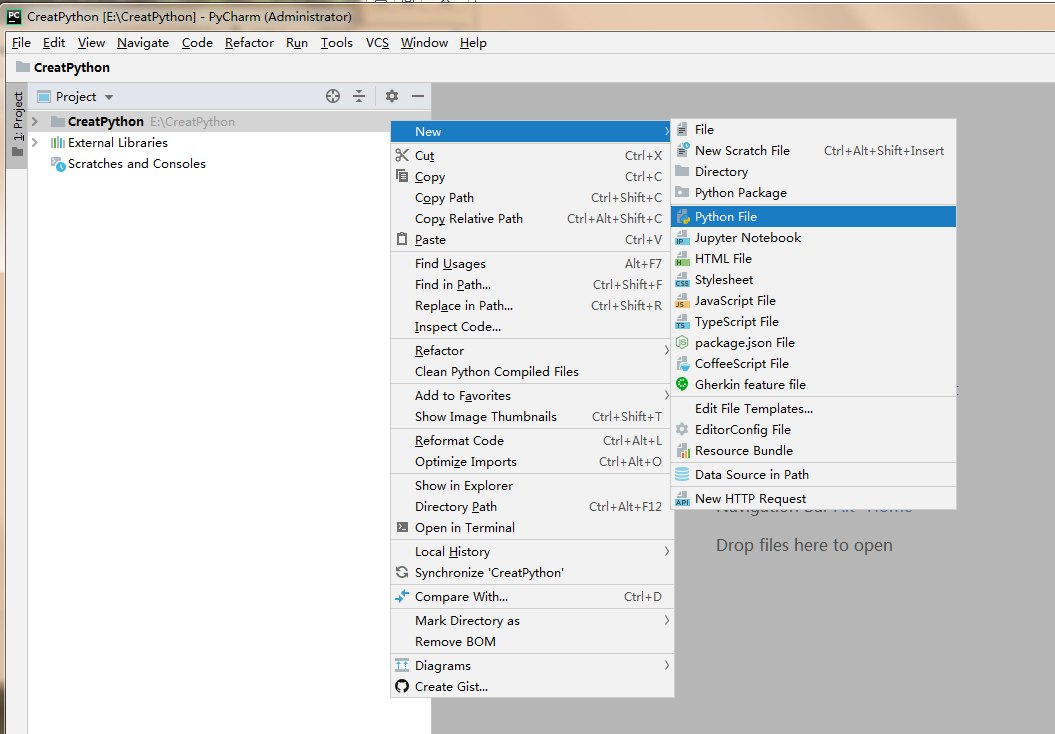
3、新建Python文件。
在Python项目中新建Python文件,右键CratPython文件夹,选择“New→PythonFile”,创建新的Python 文件。
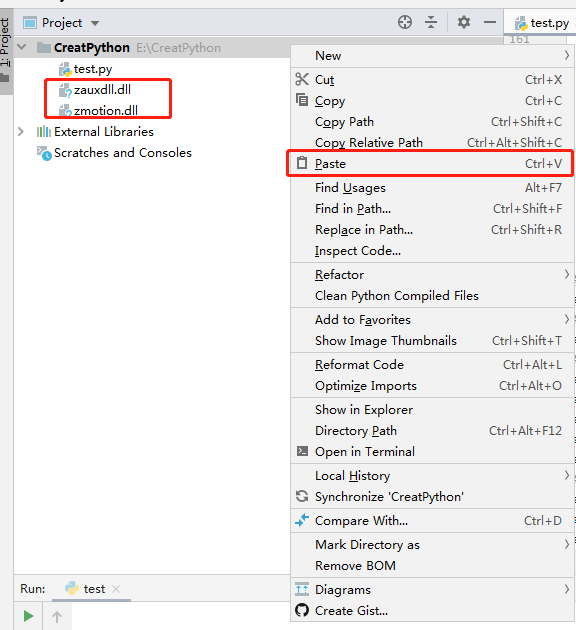
4、将Python动态库复制到Python项目中。
5、模块导入并加载动态链接库。
首先把Python中的两个模块导入(platform和ctypes模块),其中ctypes模块提供和C语言兼容的数据类型,能够很方便地调用动态链接库中输出的C接口函数。
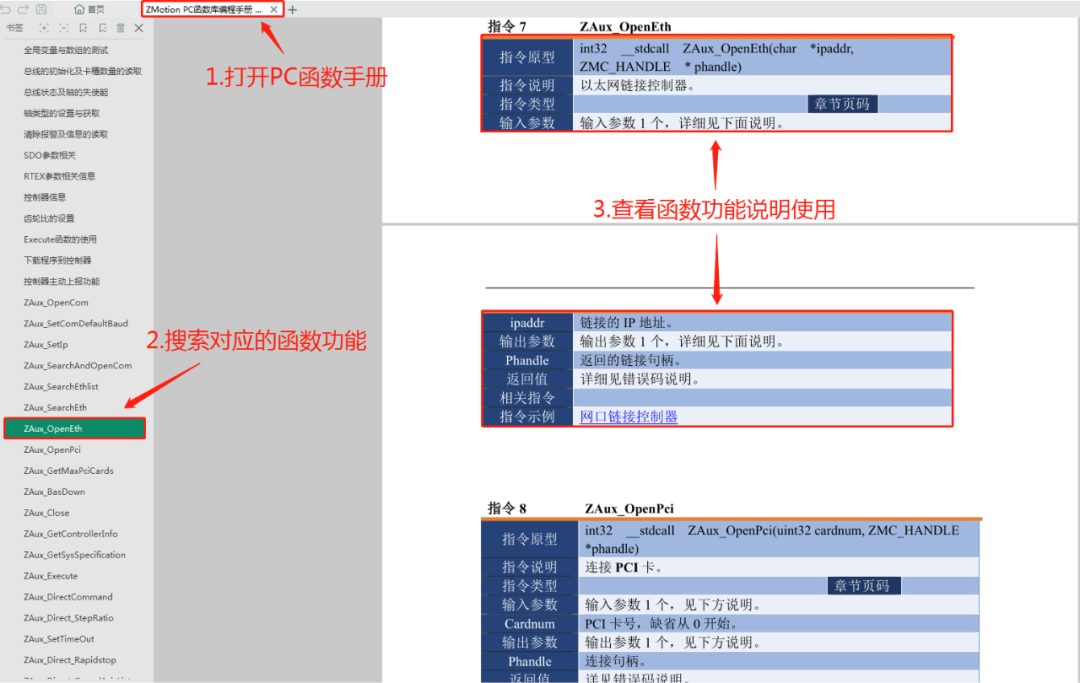
6、通过加载导入的动态库链接库,调用ZMotion PC函数手册中的函数。
1)使用操作。
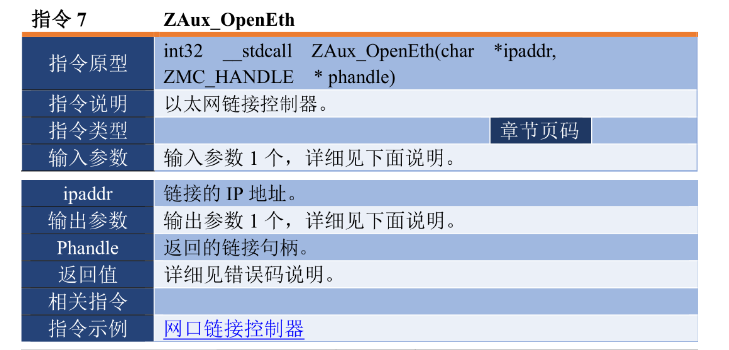
首先根据控制器连接方式用连接函数连接控制器,输出控制器句柄,利用控制器的句柄我们就可以对库函数进行操作。
即“打开PC函数手册→搜索想要的函数功能→查看函数说明→通过刚才加载的动态链接库返回的zauxdll对象进行调用”。
2)通过ip连接函数接口返回的控制器句柄handle,对控制器的句柄handle操作。
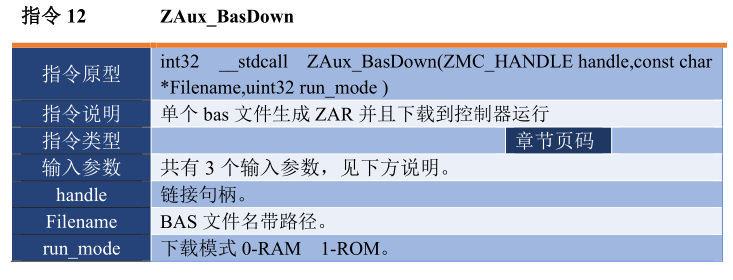
3)我们会提供EtherCAT总线初始化的basic代码,可以通过指令ZAux_BasDown()将总线初始化的basic代码下载到控制器中,从而实现EtherCAT总线轴的初始化。
4)轴参数设置。
5)轴参数读取。
6)单轴运动。
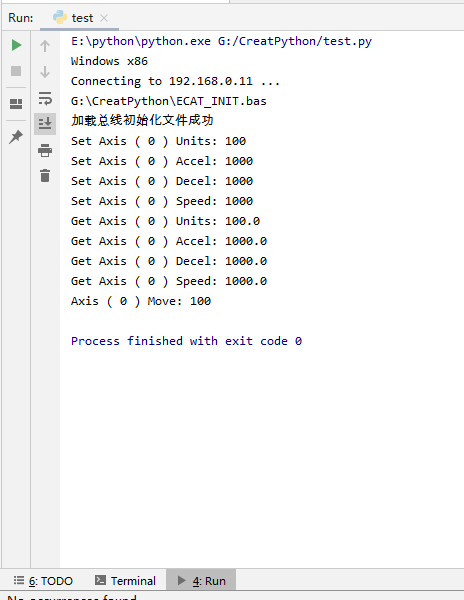
7)运行程序,输出结果。
8)运行并输出程序运行结果