ABB机器人视觉通讯定位引导
1、设置WAN口IP地址进入ABB主菜单,选择重启系统,选择 高级

2、启动引导应用程序

3、点击Settings

4、设置IP地址,需要和视觉在同一网段设置好后点 OK

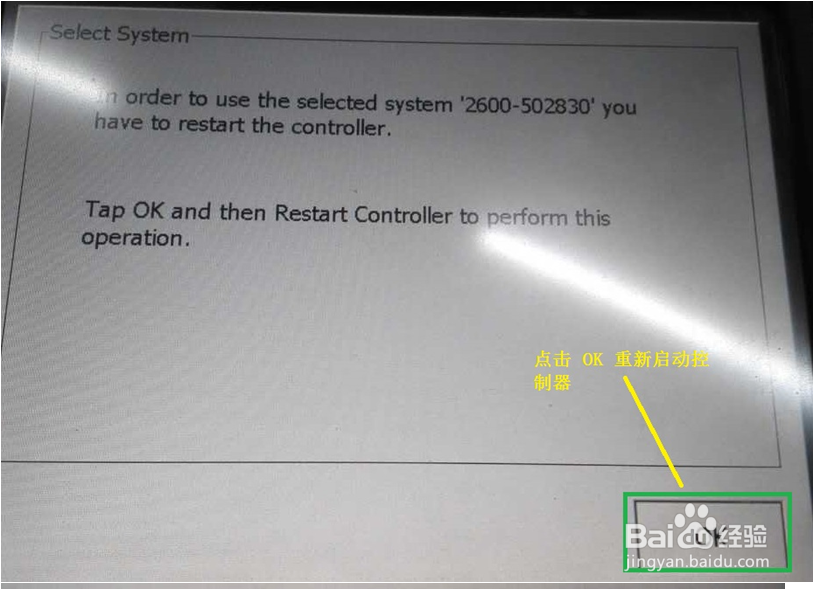
5、选择我们要启动的机器人系统后点击Close

6、点击OK
7、将视觉网线插入WAN口

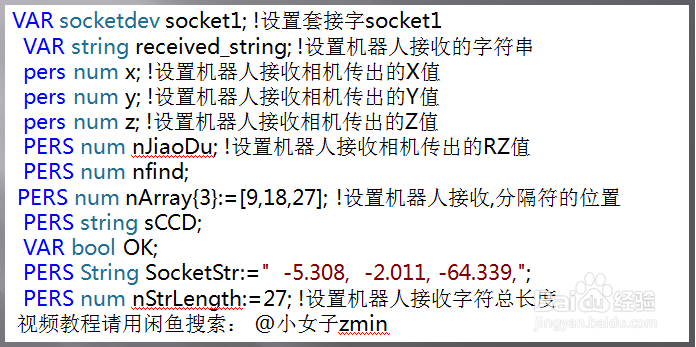
8、设置相关数据!后的数据为注释使用,实际编程可忽略
9、以下为创建套接字连接以及发送拍照命令的对话很多康耐视In-sighn相机需要咸犴孜稍先输入账号密码登录后才能接收拍照命令。

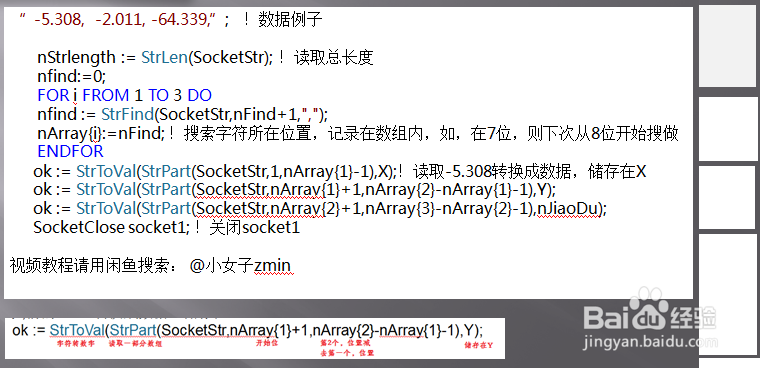
10、数据提取,分别储存在X\Y\nJiaoDu
11、视觉数据引用案例

声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。
阅读量:55
阅读量:87
阅读量:24
阅读量:68
阅读量:31