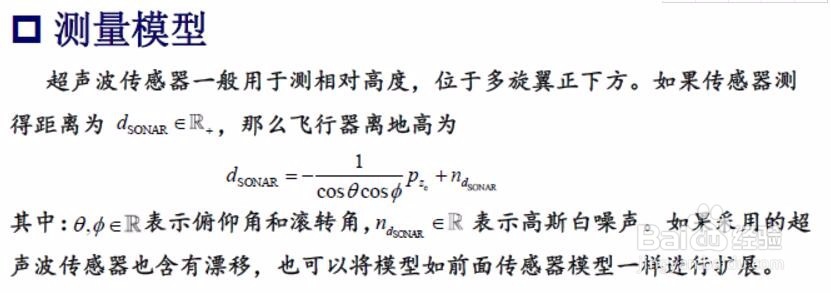
超声波的四轴定高控制
1、理论上讲超声波放在飞行器的正下面的中心是最好的,这样测出来的距离更加精确。如果荻瘠稣渖飞行器俯仰角不为0,从数学上讲要进行补偿,但是实醪撅此饕际上你们可以算一下角度变化10以内的时候对这个距离造成的距离影响很小。所以并不需要PPT里面所讲的这种几何补偿,而且在STM32中三角函数的计算量非常大,就算是换成快速三角函数,造成的计算误差,远远大于实际测量误差,补偿反而得不偿失。而且超声波也没有明显的偏移。PPT的作者可能并没有实际实现过。超声波也不需要装在正下方,装在支架的两边可以。因为正下方可是要放摄像头的。
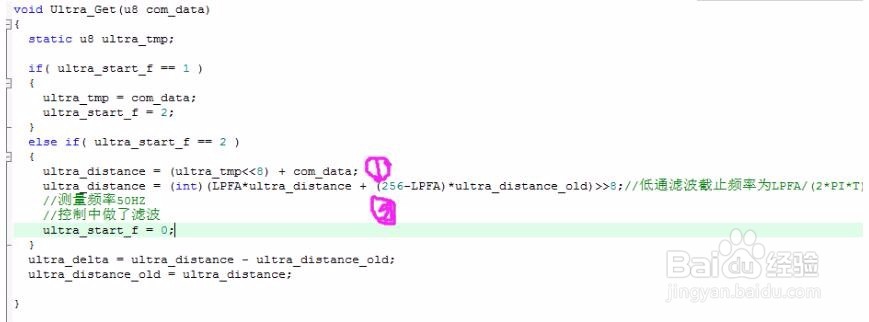
2、超声波有的采用串口协议,我个人觉得串口协议的蛮好用,下面是程序截图,语句1意割翌视扼思是测出的数据是两个字节得到的,第一个字节左移八位,加上第二个字节。两者距离,单醐蛑臀谁位是mm,笔者实测,超声波模块的精度很高。测量得到原始的ultra_distance,需要处理,不然得到的数据是上下抖动的。
3、所以下面这个不是很明显,还是可以看出跳动。通常有3种滤波算法:1.均值滤波2.低通滤波3.kalman滤波
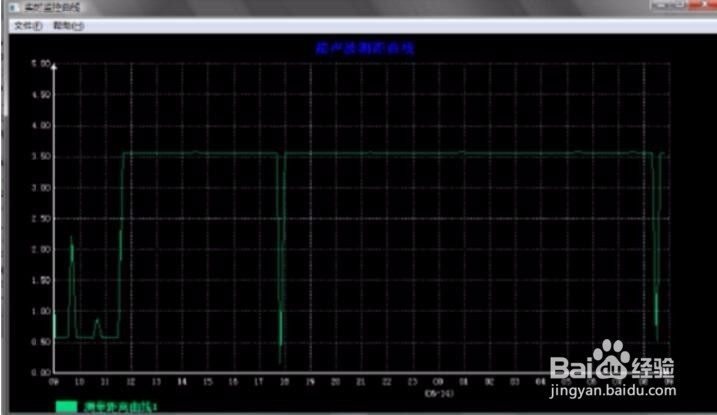
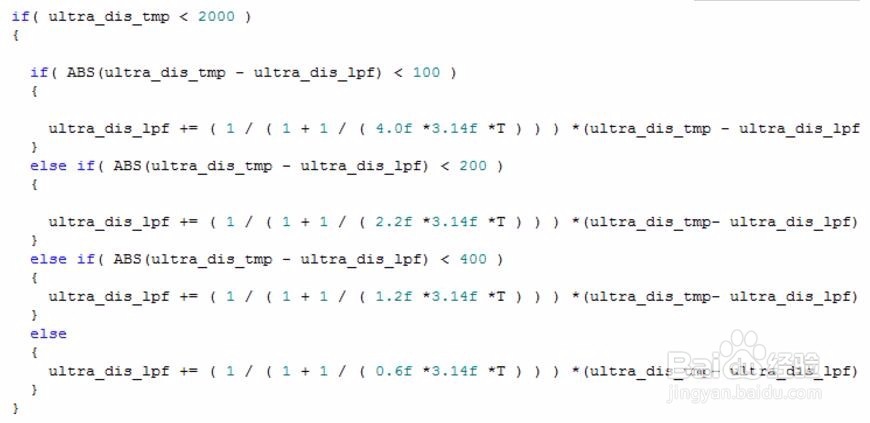
4、笔者实测,第二三中效果差不多,且低通滤波更加易于实现,第一种的效果很差,那么我们来看一下低通滤波。
5、这个是最具工程性的,而且编程难度实际上很大。降落来讲,首先低于一个阈值就必须关闭电机,不然四周会在地面跳跃,不稳定;再就是从高处下落,更好地办法是开环的,慢慢的较低油门,就可以慢慢掉下来。比控制高度的方法效果更高;
声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。