正运动技术EtherCAT 扩展模块使用步骤
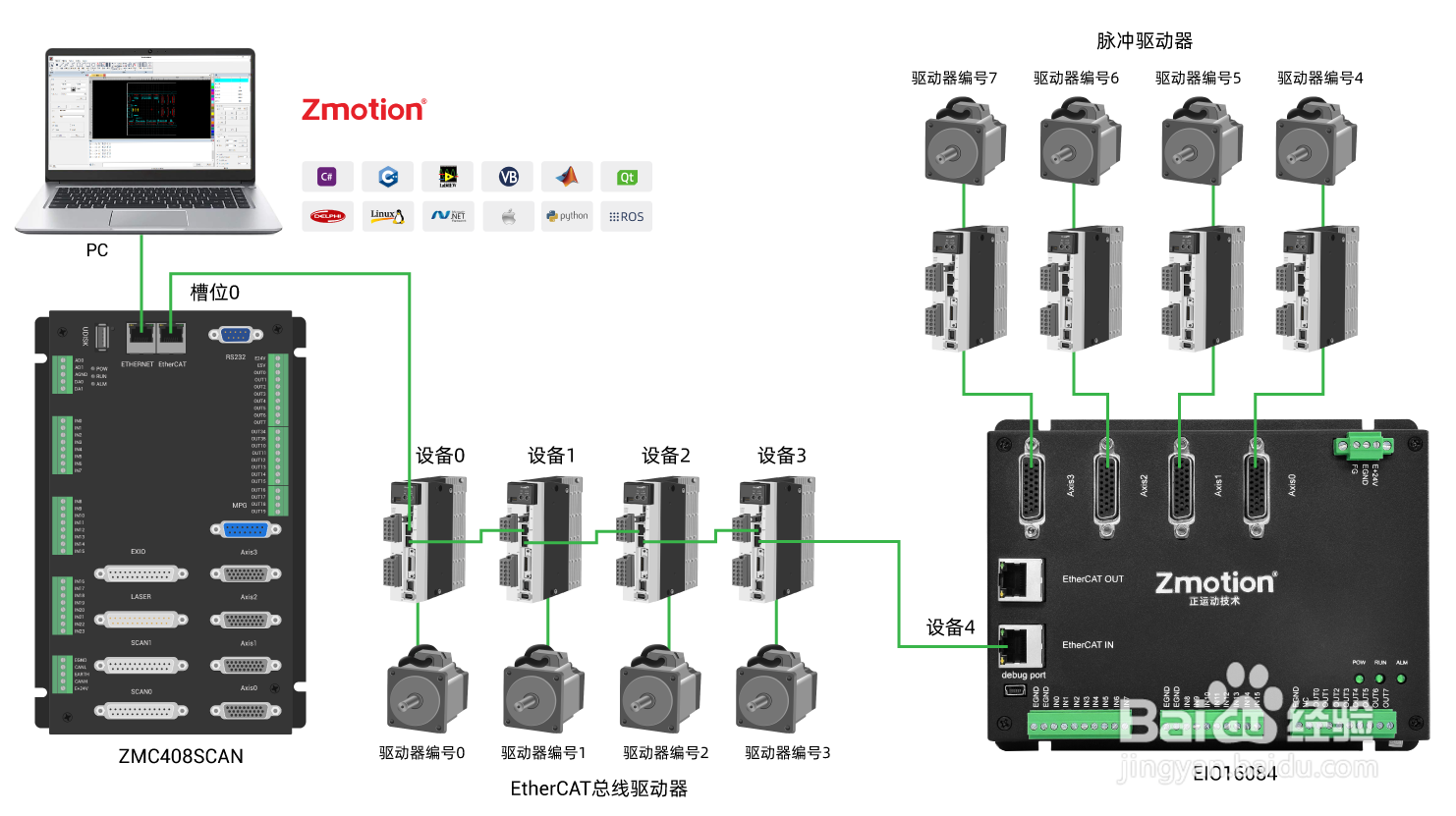
1、请按照下图接线说明正确完成电源,EtherCAT 总线,IO 信号等模块的接线;
2、控制器上电后请选用 ETHERNET 接口、RS232 串口连接 ZDevelop;
3、EIO16084 扩展模块需要经过总线初始化易七淄苷之后才能使用;①执行总线初始化程序,初始化过程中识别 EIO 扩展模块的设备编号和连接的驱动器编号,根据 驱动器编号操作轴映射,采用 AXIS_ADDRESS 指令映射轴,根据设备号操作扩展模块的 IO 映 射,采用 NODE_IO 指令映射 IO,设置 DRIVE_PROFILE 和 ATYPE;② 初始化成功后,使能扩展模块上的驱动器;③ 使能完成设置基本运动参数 ATYPE、UNITS、SPEED、ACCEL、FWD_IN、REV_IN 等轴参数,再发 送运动指令便可驱动电机;
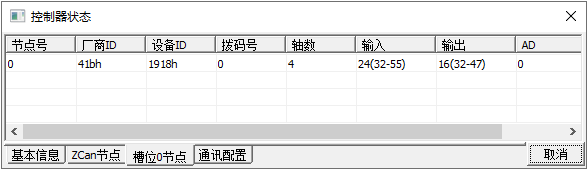
4、设置完成后即可建立通讯,通讯成功“控制器状态”-“槽位 0 节点”则会显示扩展模块的信息;
5、可通过“IN”指令直接读取相应输入口的状态值,也可以通过“ZDevelop/视图/输入口”界面直观查看输入口状态,详细说明见“ZBasic编程手册”;

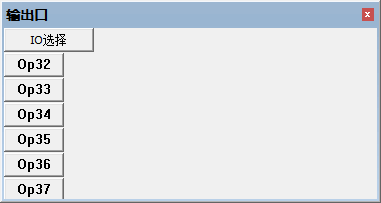
6、可通过“OP”指令直接操作端口开启或关闭,也可以通过“ZDevelop/视图/输出口”界面直接点击进行开启或关闭,直观查看输出口状态,详细说明见“ZBasic编程手册”;
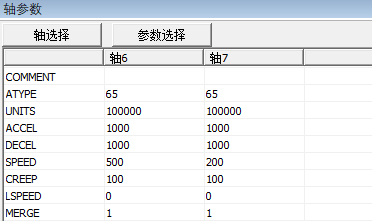
7、脉冲轴的相关参数比较多,需通过相关指令进行设定和查看,详细说明见“ZBasic编程手册”中“轴参数与轴状态指令”部分说明;也可以通过“ZDevelop/视图/轴参数”界面直观查看。
8、通过ZDevelop视图栏中手动运动窗口操作控制相应运动即可。

声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。