UG仿真中怎么定义连杆
1、如下图所示,是一个运动机构,下面我们要对他定义连杆,

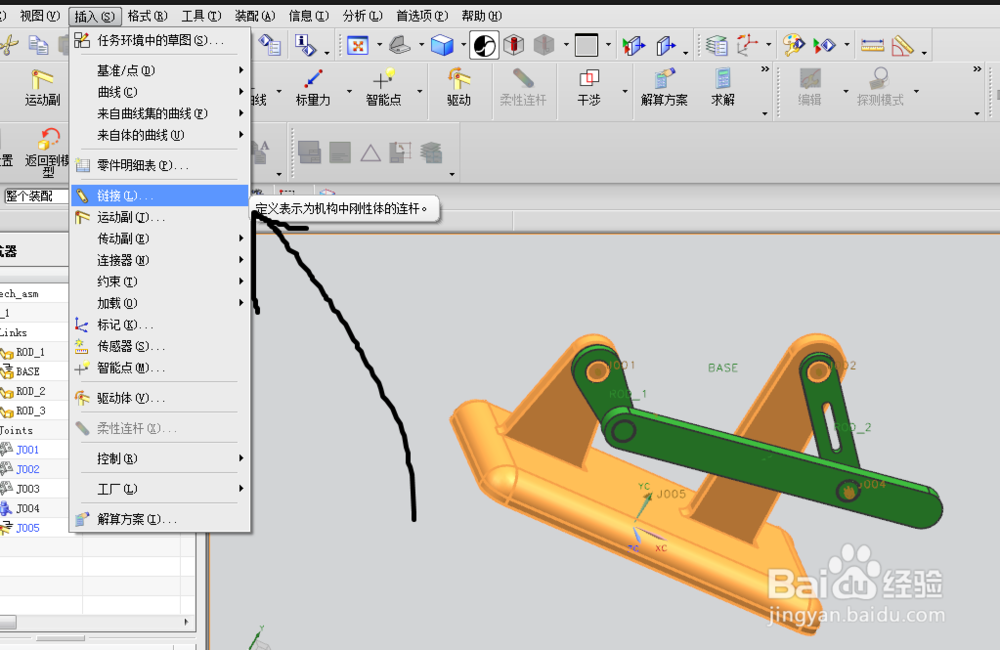
2、定义连杆有三个途径,我们一一介绍,第一个途径是通过选择下拉菜单插入,找到链接命令,如图所示(要选择要被定义的件)
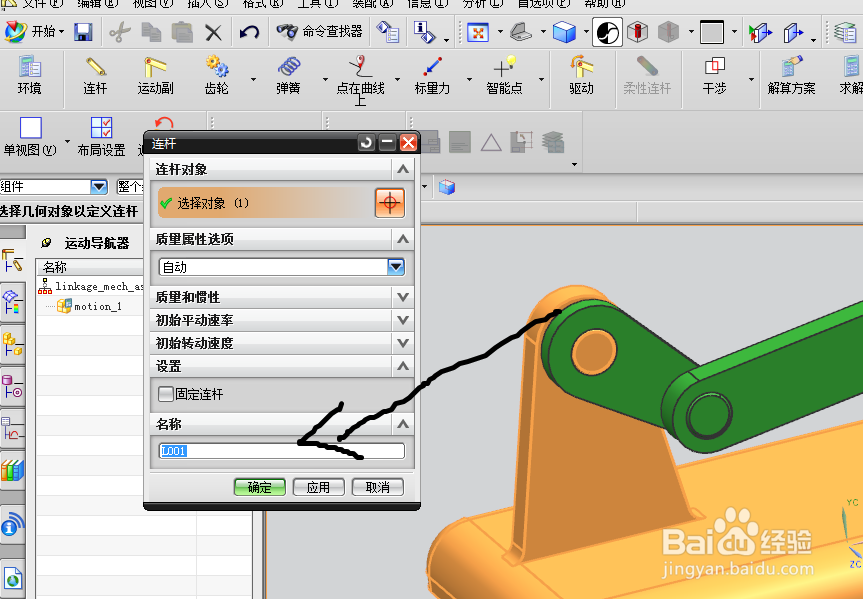
3、点击链接后会出现一个对话框,如图所示,一般默认命名为L001
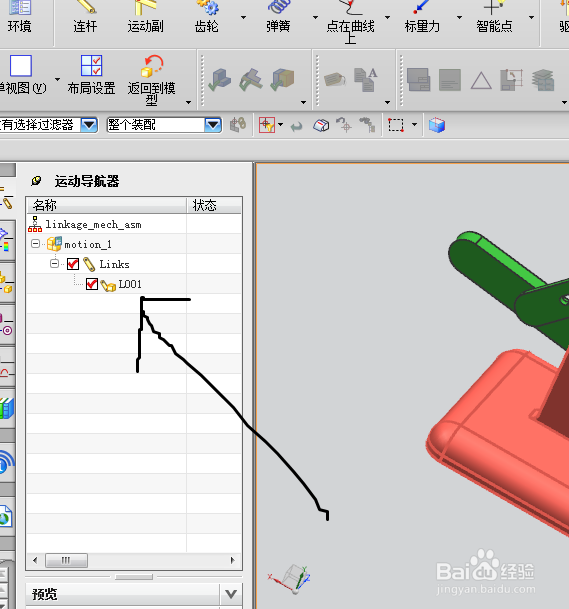
4、然后在运动导航器里面可以看到,这个件被命名为了L001,
5、第二个是通过运动工具条中点击连杆按钮来确定,如图所示
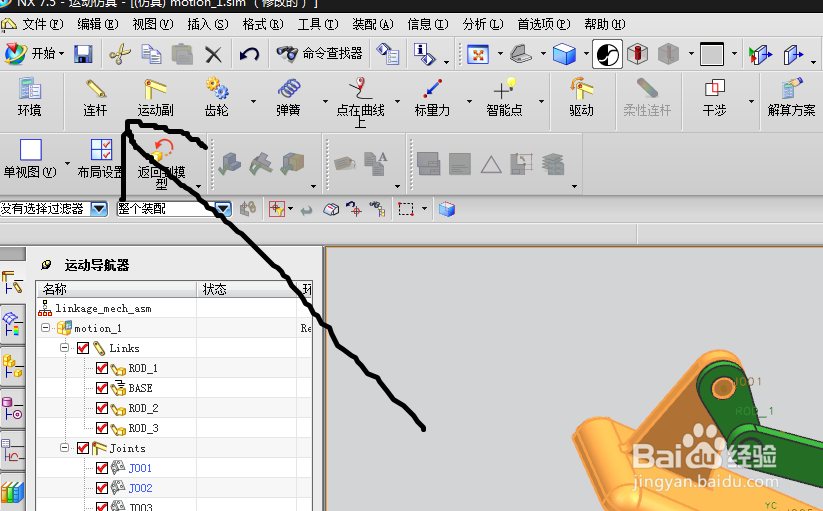
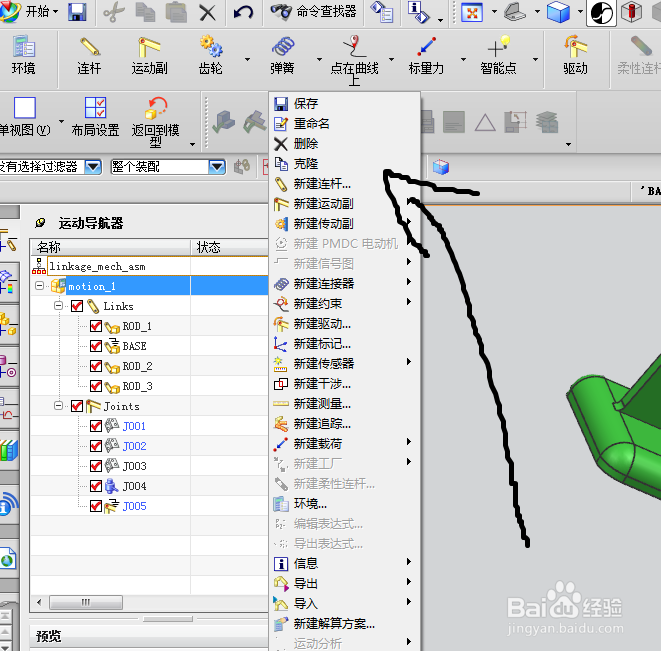
6、第三个是在运动导航器界面中右击motion-1,找到新建连杆命令,如图所示
声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。