如何从2D地图创建居住网格
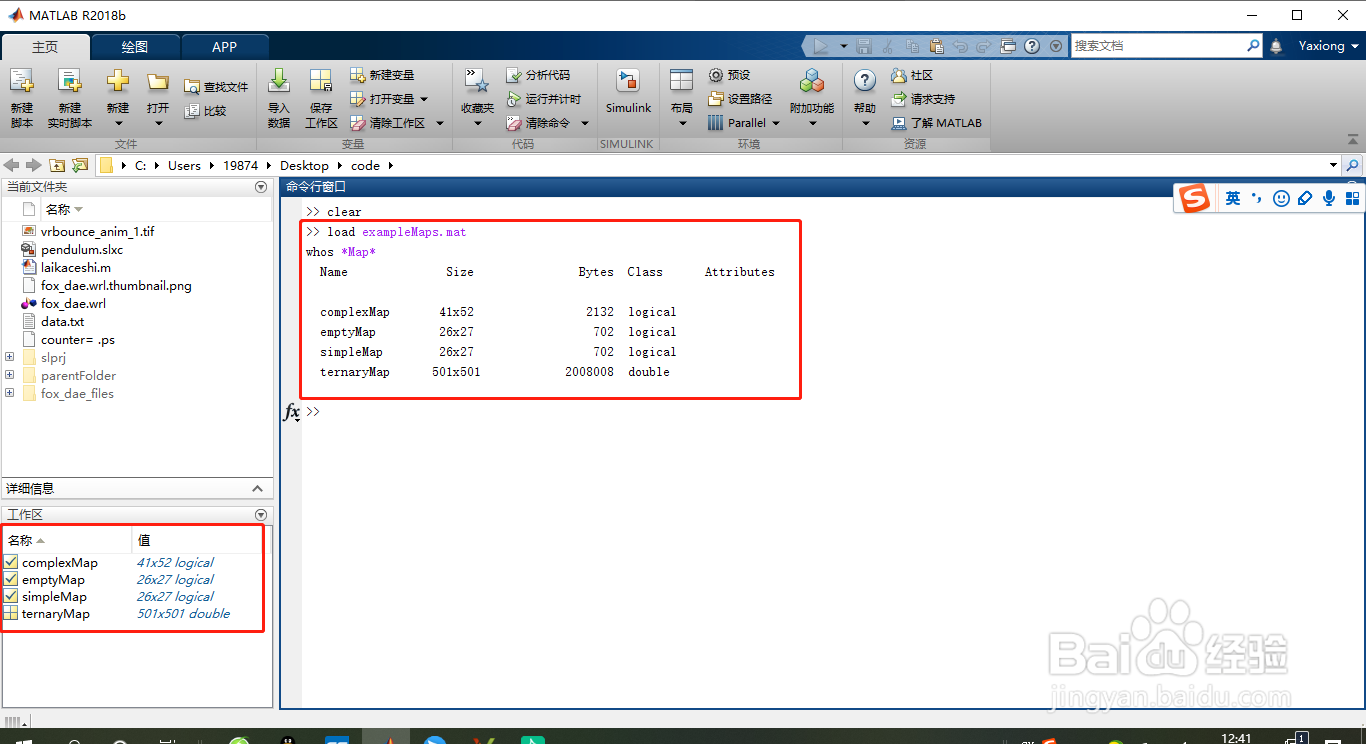
1、%加载两个映射,simpleMap和complexMap作为逻辑矩阵。使用who来显示地图。命令行键入:load exampleMaps.matwhos *Map*
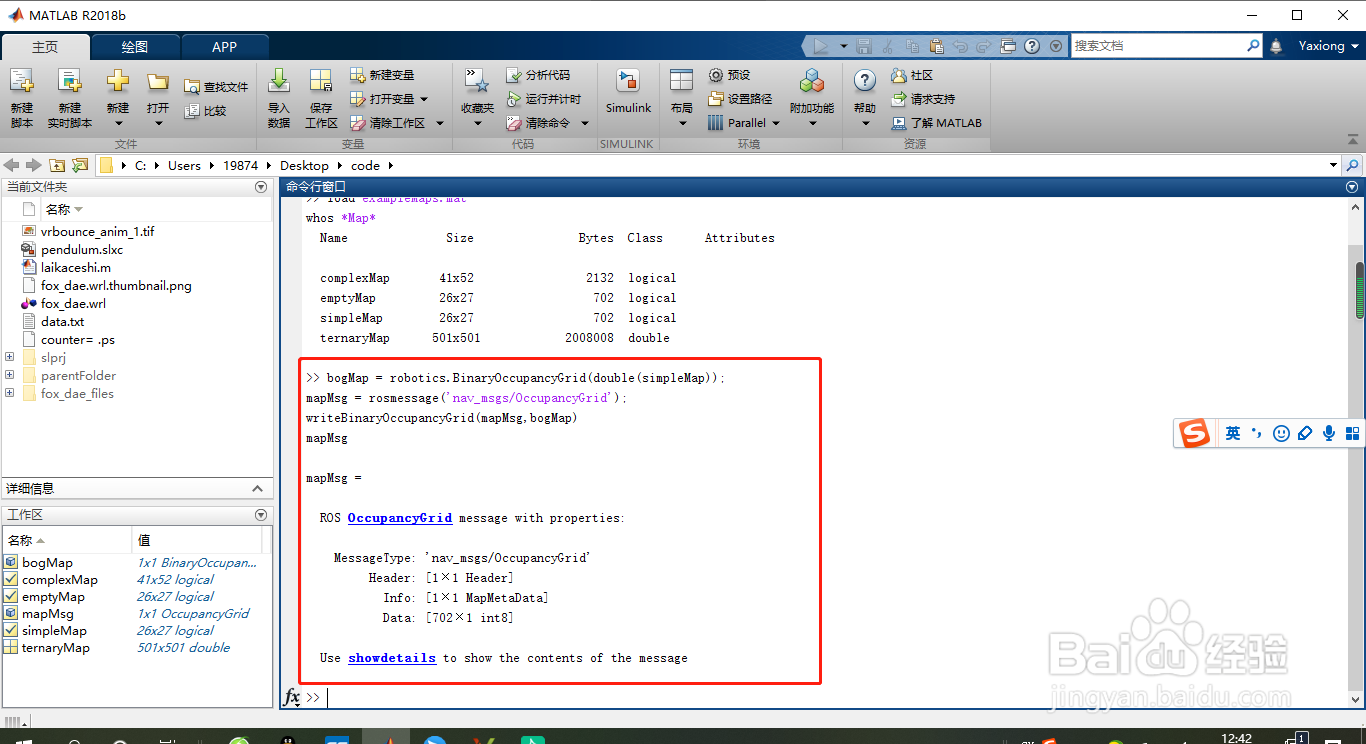
2、%使用一个binary佔有人网格对象从simpleMap创建一个ROS消息。捂执涡扔使用writebinary佔用网格来编写佔用网格信息。命令行键入:bogMap = robotics.BinaryO艘早祓胂ccupancyGrid(double(simpleMap));mapMsg = rosmessage('nav_msgs/OccupancyGrid');writeBinaryOccupancyGrid(mapMsg,bogMap)mapMsg
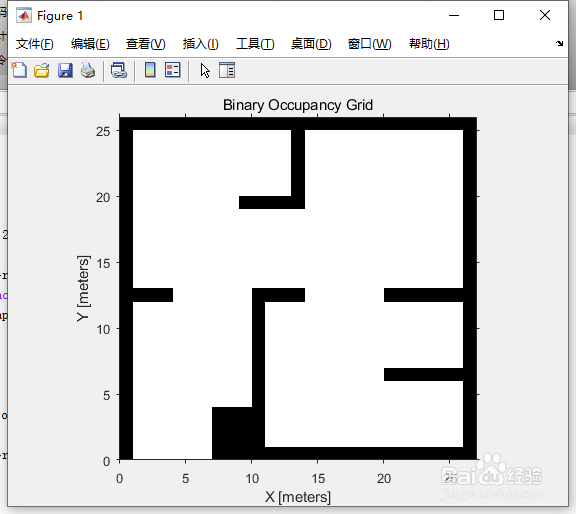
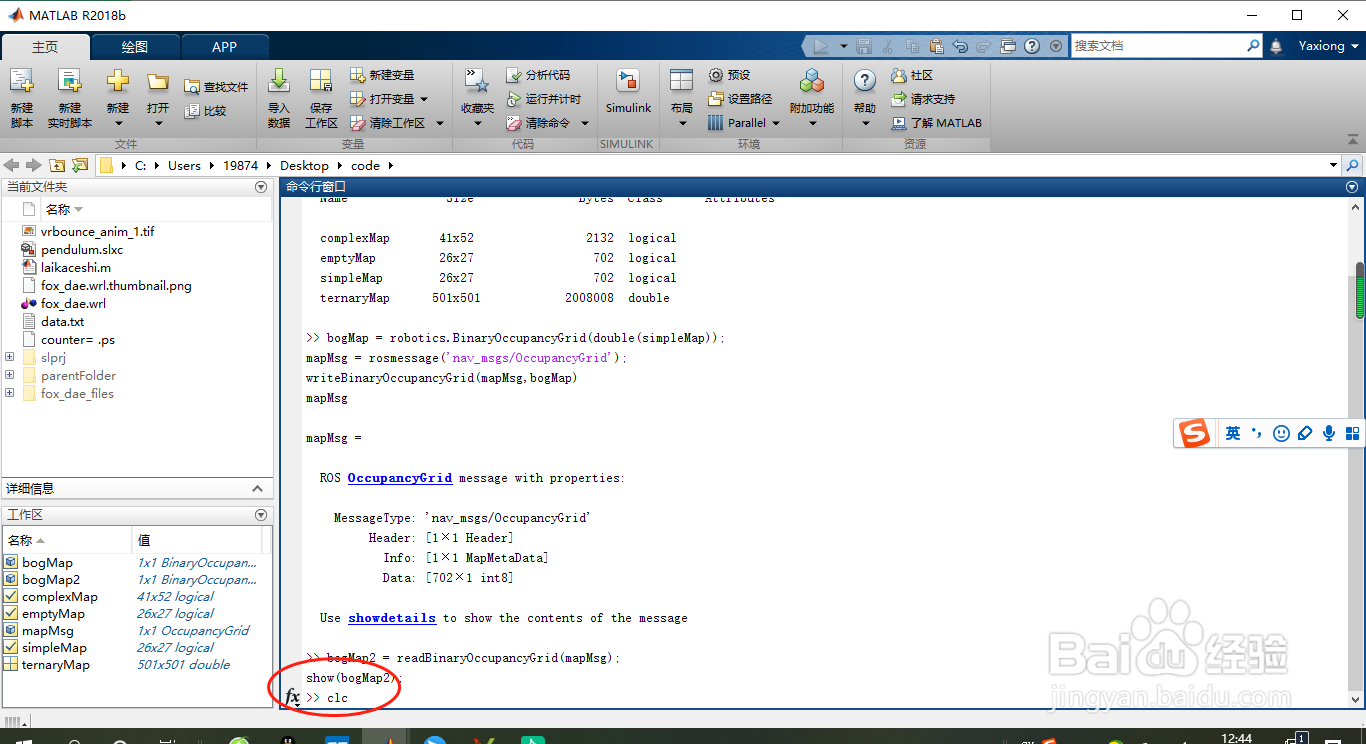
3、%使用readbinary佔用网格将ROS消息转换为abinary佔用网格对拇峨镅贪象。使用object函数show来显示地图。命令行键入:bogMap2 = readBi荏鱿胫协naryOccupancyGrid(mapMsg);show(bogMap2);
4、最后清理命令行窗口,命令行键入:clc。
5、清理工作区,命令行键入:clear。
声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。
阅读量:89
阅读量:45
阅读量:50
阅读量:38
阅读量:76