接触非线性——齿轮啮合仿真之工况设置(3)
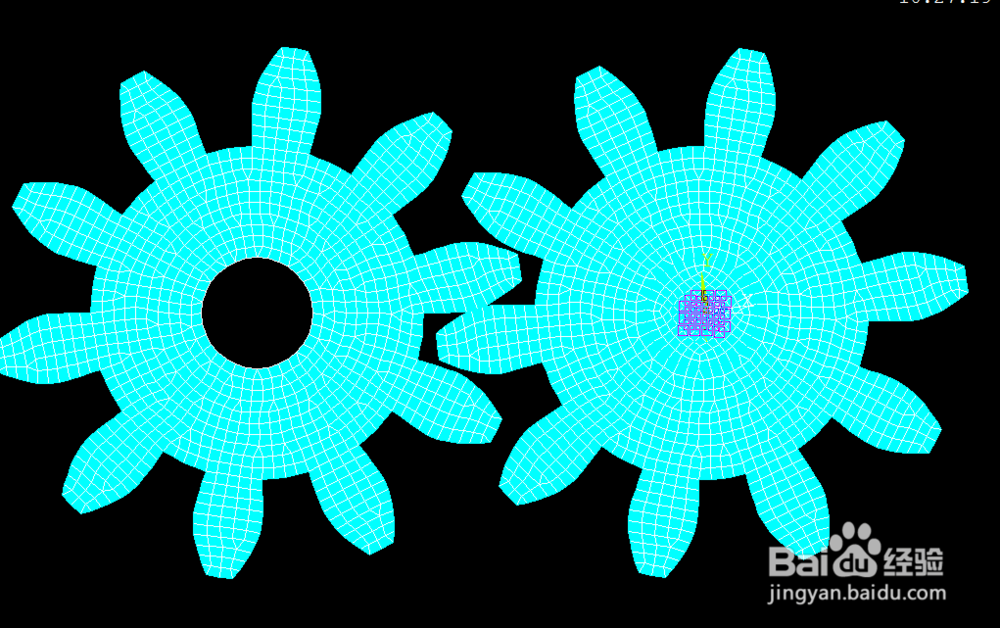
1、1)将模型导入ANSYS,点击Modeling>Create>Contact Pair,检查设置的接触单元法向,确认法向正确,如下:

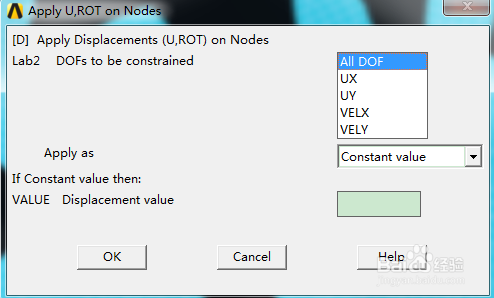
2、2)约束轴承的所有位移,点击Define Load>Apply>Strctural>Displacement>On nodes,如下:
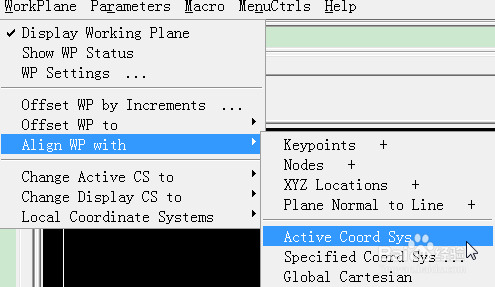
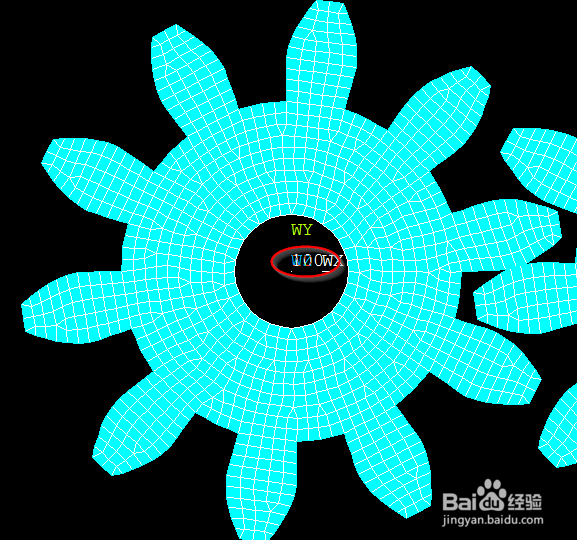
3、3)在齿轮1上施加转动位移以及加速度,点击Align WP with>在齿轮1中心建立局部的柱坐标系如下,命名为100:

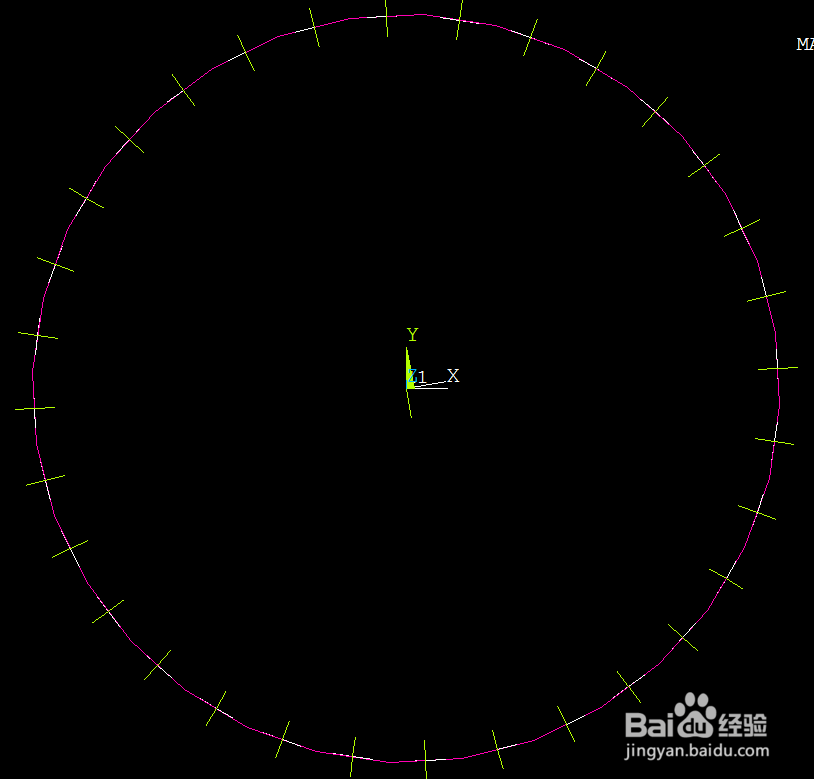
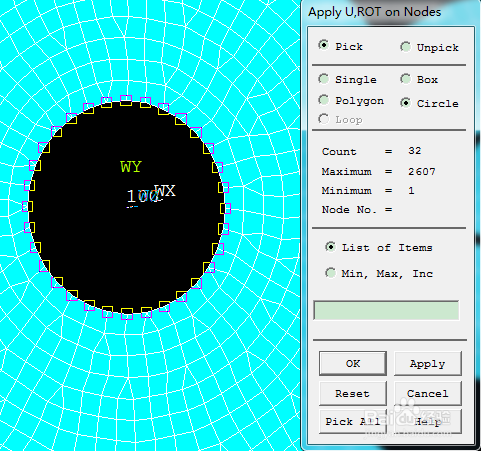
4、4)施加径囿鹣分胰向约束,将齿轮1内圈节点的径向位移进行约束,点击Define Load>Apply>Strctural>Displacement>On nodes:
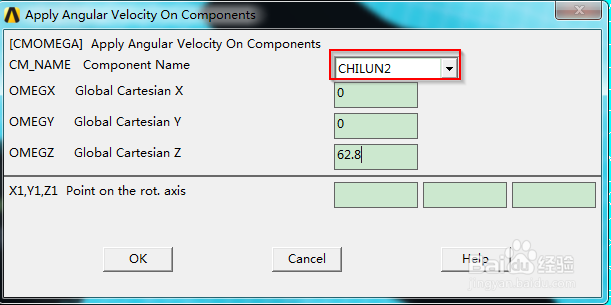
5、5)施加转速铲邑诱匮惯性载荷,点击Inertia>Angular Veloc(施加转动角速度)>点击On Components>By origin>选择齿轮2组件,相对于总体笛卡尔坐标系施加角速度62.5rad/sec(20r/s或者1200r/min,相当于一个4级电机(1440r/min)):
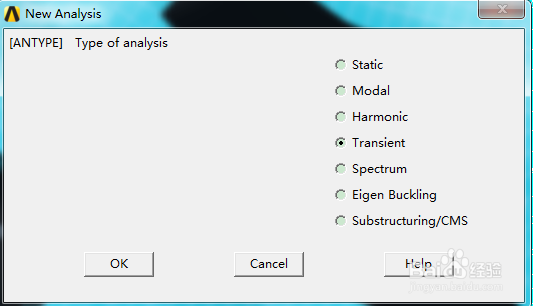
6、6)点击New Analysis>Transient瞬态分析;点击SOL' Coltrols>设置求解如下,点击Solve进行求解:

声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。
阅读量:64
阅读量:73
阅读量:21
阅读量:27
阅读量:65