运动控制卡的使用
1、利用DC24V电源给控制器提供电源。
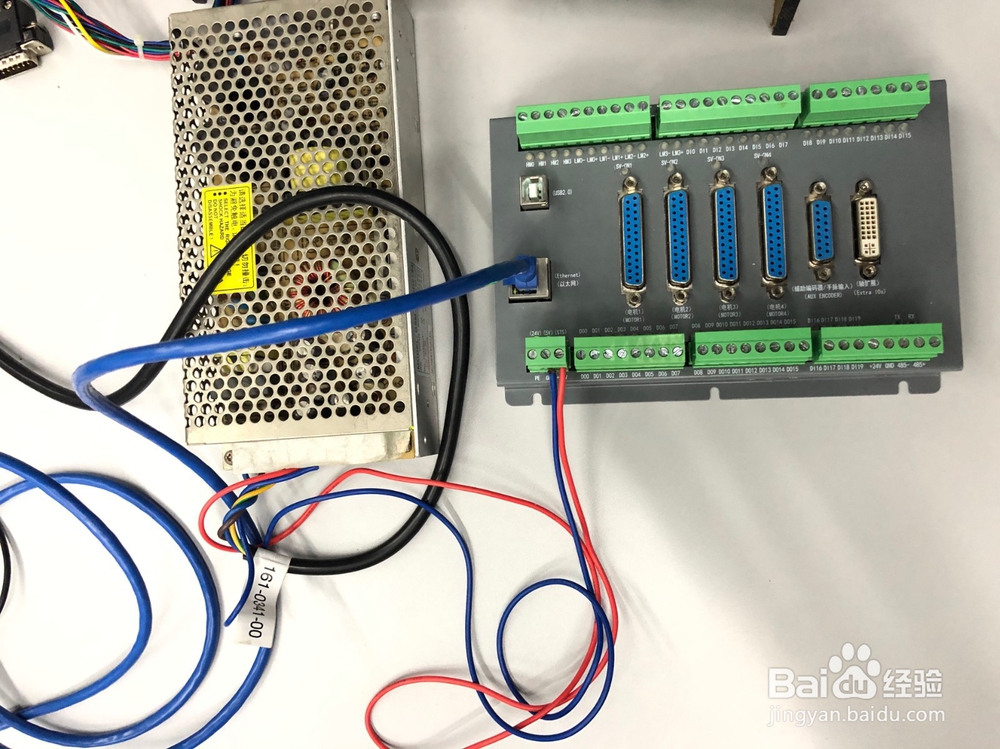
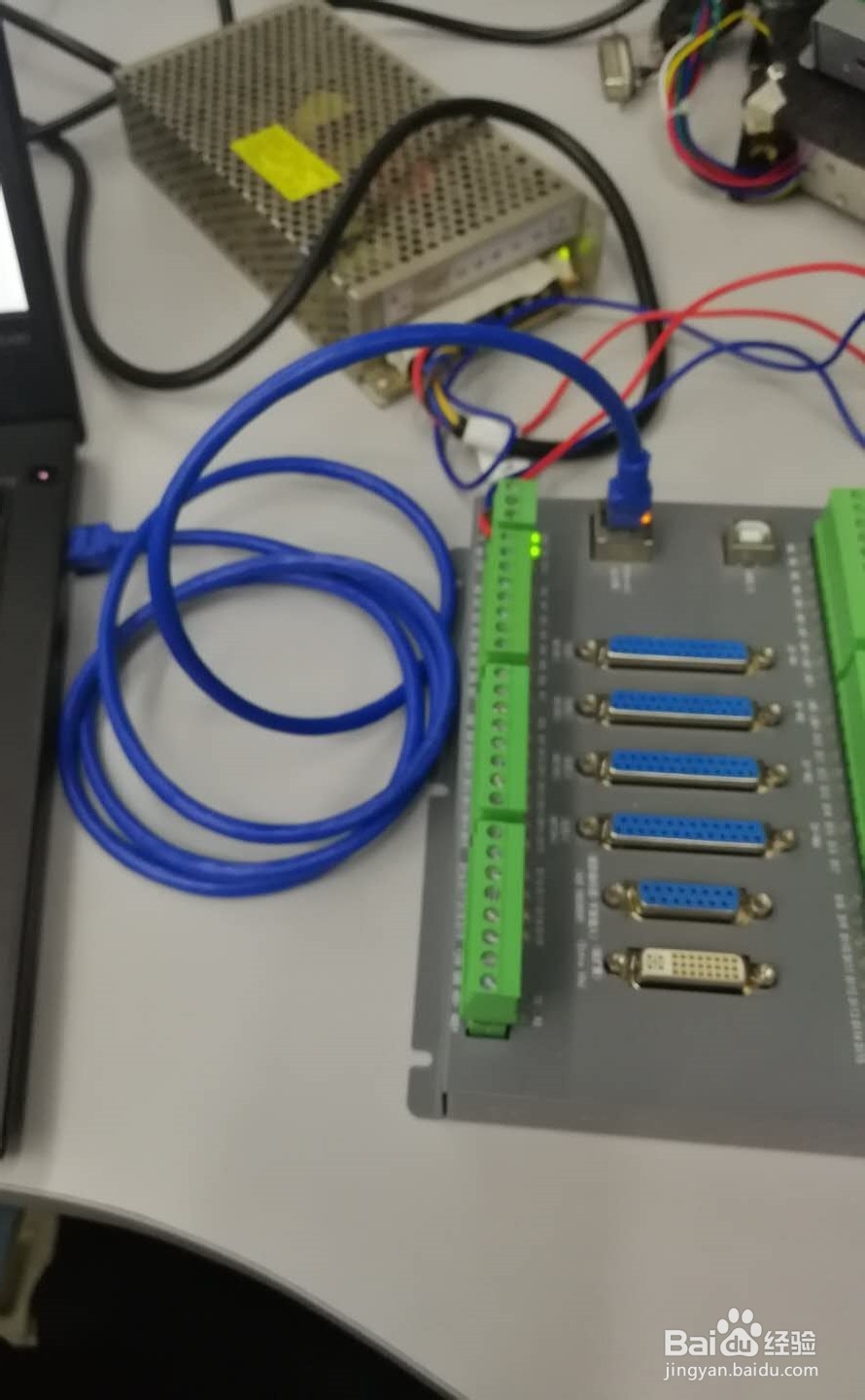
2、利用网线将PC和控制卡连接,控制器的24V灯常亮、5V灯常亮、STS灯闪烁。
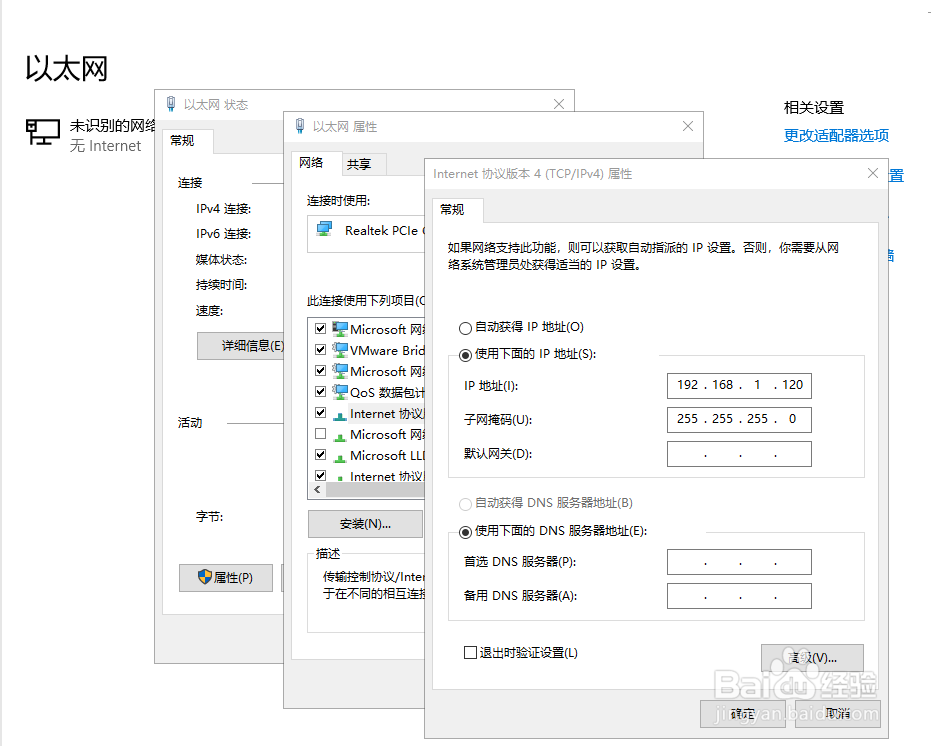
3、修改PC端IP和控制卡IP为同一个网段,控制卡默认IP为192.168.1.110,例如我们可以将PC端网址修改为192.168.1.120。
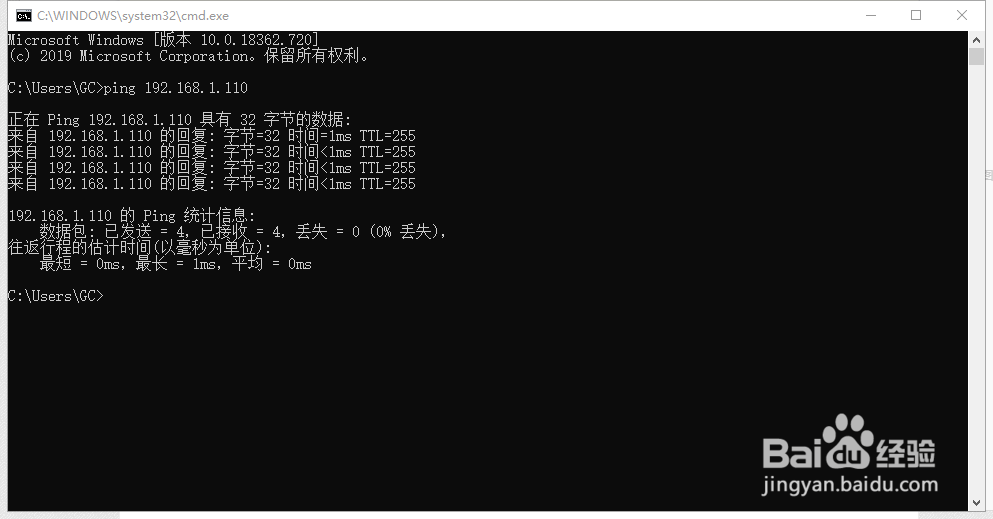
4、打开命令行工具,输入ping 192.1瀵鸦铙邮68.1.110,连接正常的话可以ping通,否则的话需要检查网线连接是否正常,PC端IP地址是否设置正确。
5、连接好之后,我们就可以打开高川提供的demo软件GCS.EXE经行一些操作啦。
6、打开GCS.EXE,点击连接-扫描控制器-选中扫描到的控制器-连接控制器。
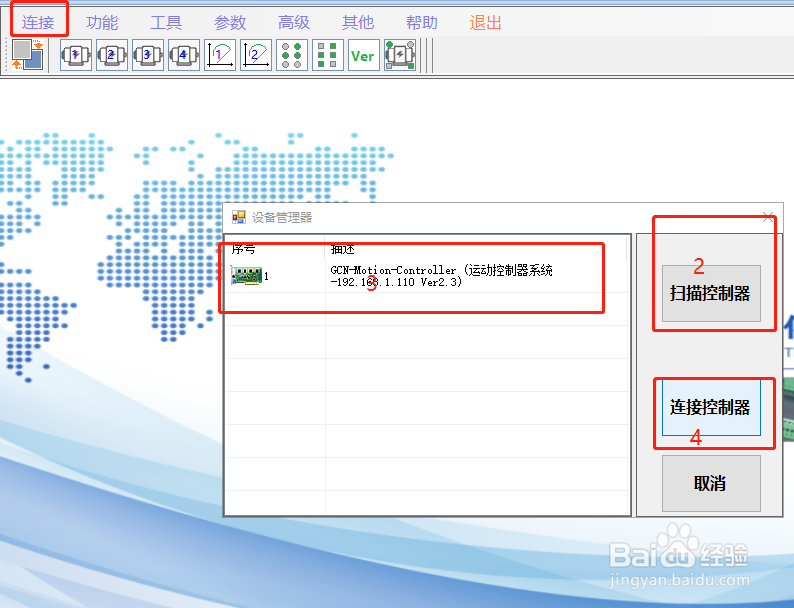
7、连接成功后,图示部分会变成绿色。此时我们可以根据利用菜单选项里面的“功能”需要经行一些功能测试,大家慢慢研究,这里就不细说啦。

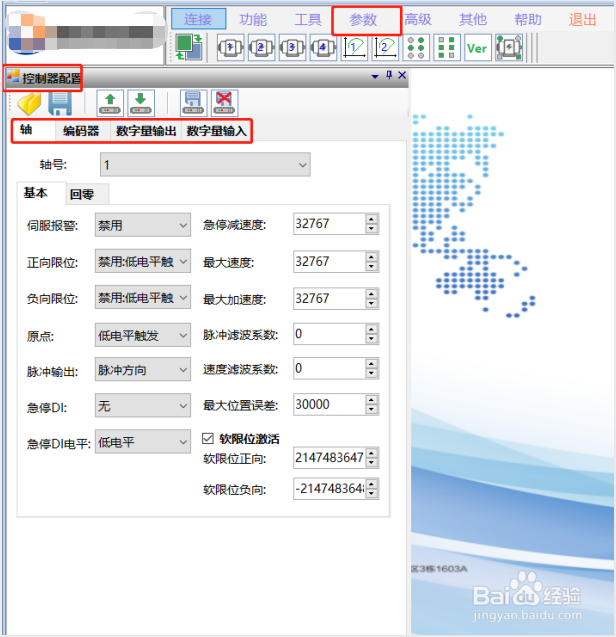
8、点击菜单栏--参数--控制器配置,对实际需要对各轴的伺服报警、正负限位、原点、脉冲模式、编码器、输入输出等等进行配置。
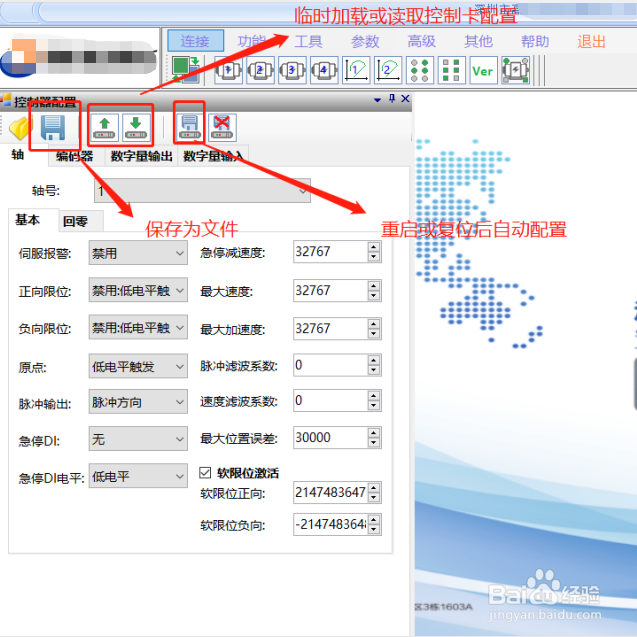
9、配置完成之后,点击保存到cfg文件,例如GCN400.cfg,此后我们就可以利用这个文件进行胆咣骜岱编程啦。如果想每次重启或复位后控制卡自动进行配置的话可以点击”保存当前配置“按钮。
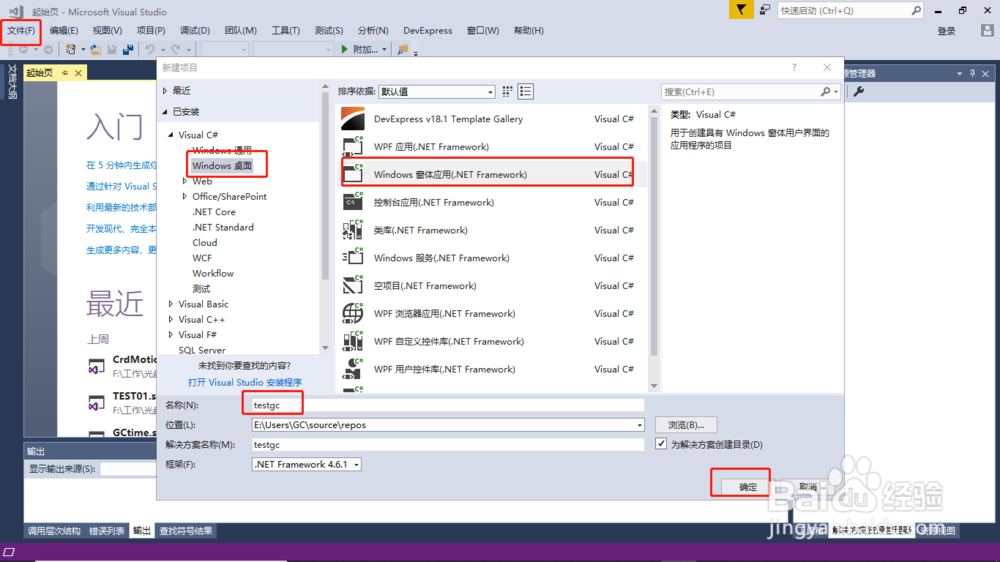
10、本文使用c#编程,以窗体程碌食撞搁序为例。打开VS2017,推荐使用版本高的编程工具,使用起来更方便。文件--》新建--》项目--》Visual C#--》Windows桌面--》Windows窗体应用,输入项目名称,例如testgc,点击 ”确定“。
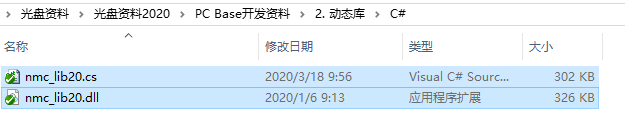
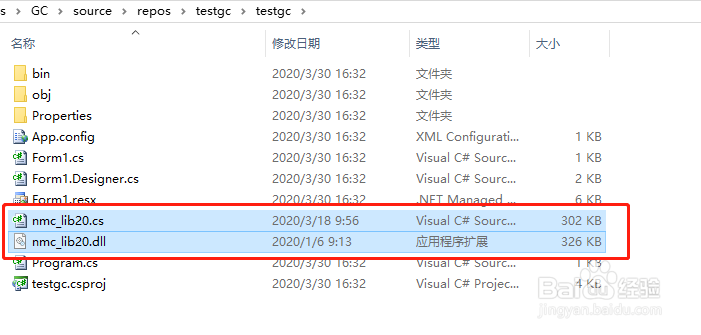
11、在高川提供的动态库中找到c#的引用文件和dll,将其复制到刚才建立的项目文件目录下。
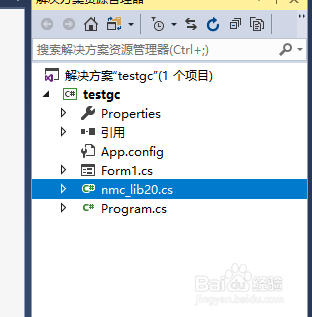
12、在解决方案管理器中,右键项目名称,把刚才复制的nmc_lib20.cs文件添加到项目中来。
13、在命令空间引用中加入using GC.Frame.Motion.Privt;
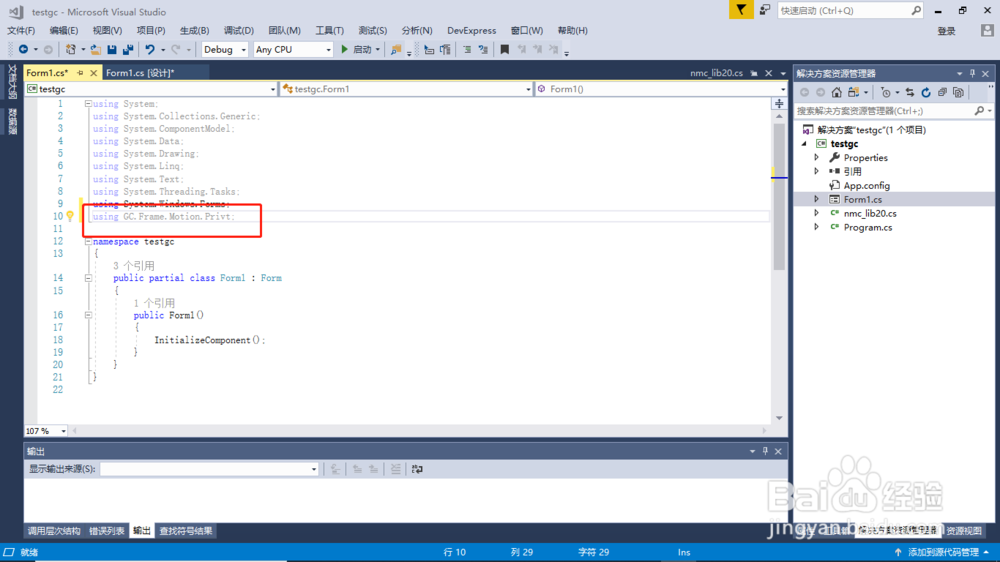
14、至此就可以调用高川的控制卡函数进行编程啦。运行程序前需要将之前生成的GCN400.cfg和nmc_lib20.dll放到程序运行目录下...\\bin\\debug\\...。
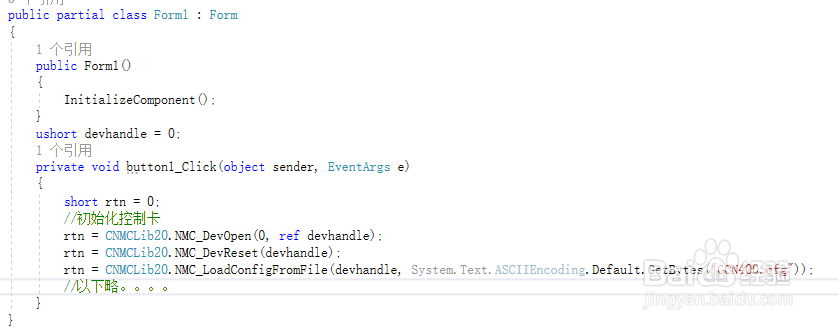
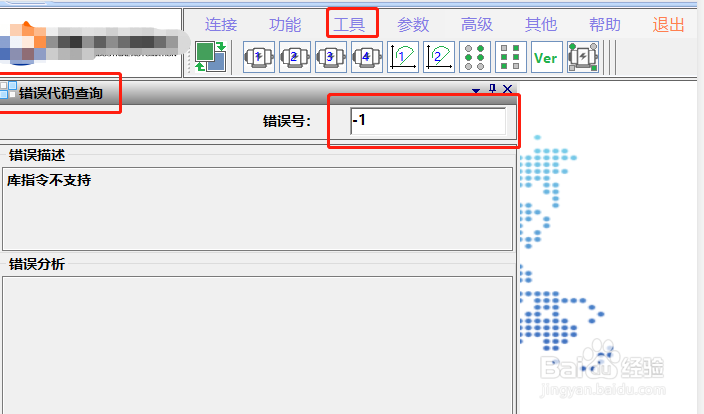
15、最后,小伙伴们不要忘了对函数返回值进行判断噢,函数返回值不等于0的话可以通过GCS.EXE进行错误码查询错误原因。