如何构建模拟图
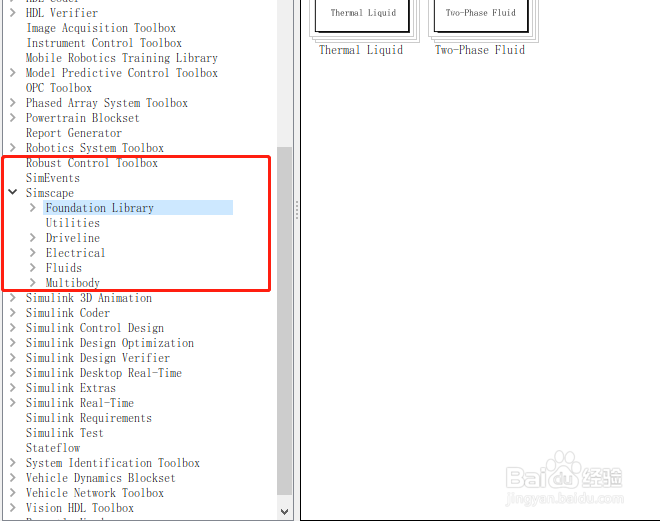
1、打开Simulink库浏览器,如Simscape Block Libraries中所述。
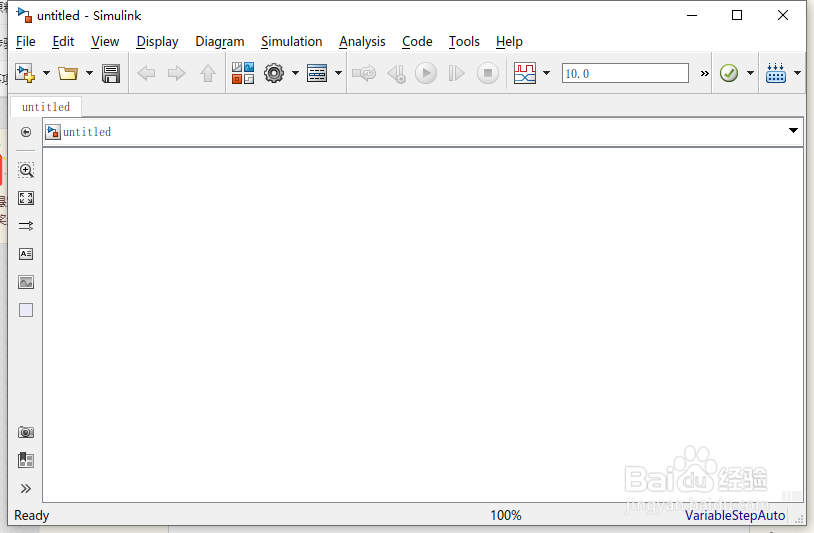
2、使用空白模型模板创建新的Simulink模型。软件在内存中创建一个空模型,并将其显示在新的模型编辑器窗口中。
3、默认情况下,Simulink Editor在模型图中隐藏自动块名。要显示隐藏的块名称以用于培训,请选择“显示”,然后清除“隐藏自动名称”复选框。

4、打开Simscape>Foundation Library>Mechanical>Translational Elements库。
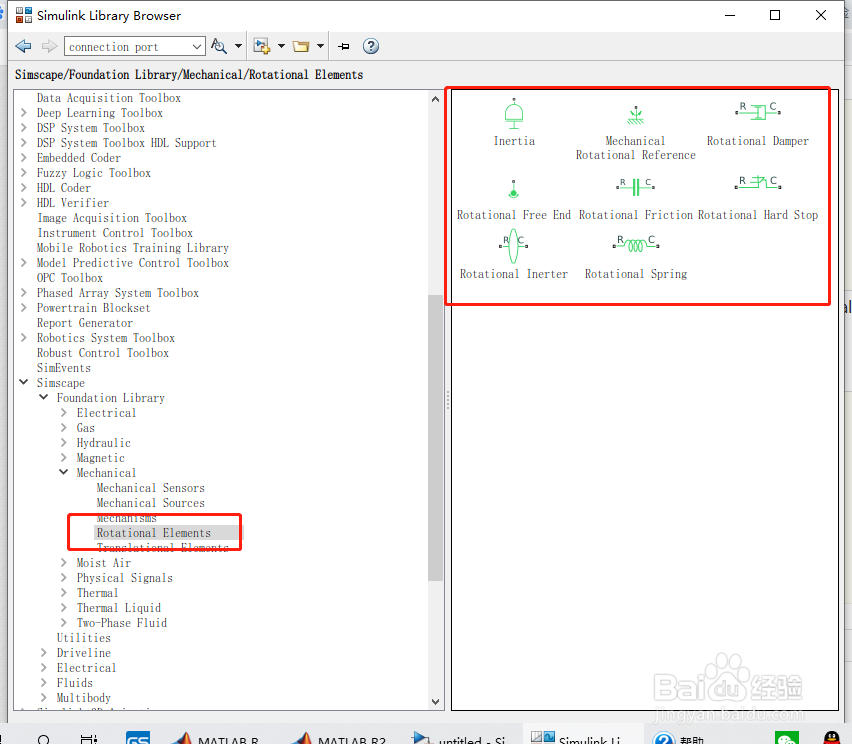
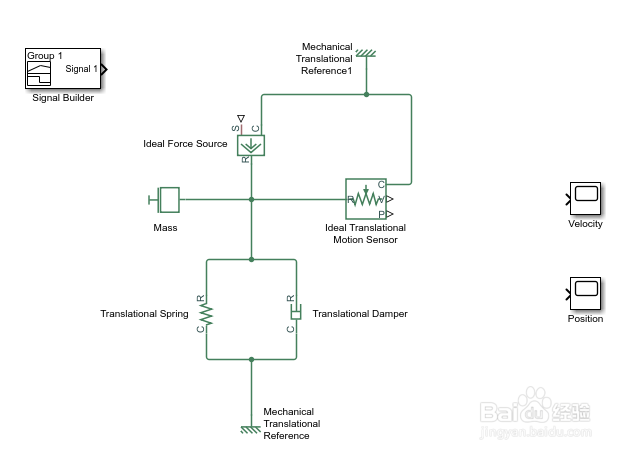
5、将质量、平移弹簧、平移阻尼器和两个机械平移参照块拖动到模型窗口中。
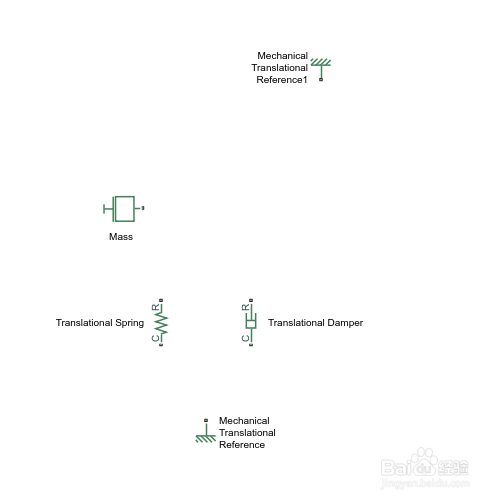
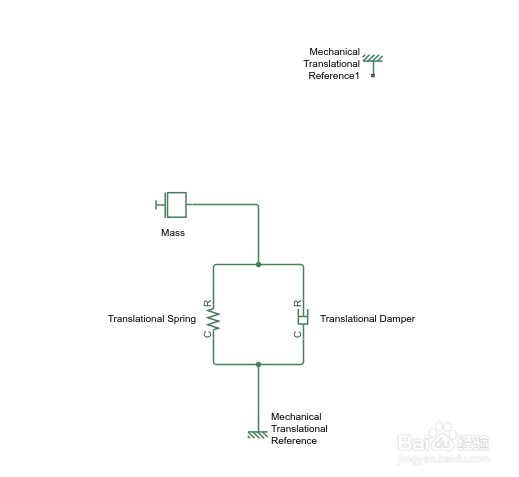
6、如下图所示确定挡块的方向。要旋转块,请选择它并按Ctrl+R。
7、如下图所示,将平移弹簧、平移阻尼器和质量块连接到其中一个机械平移参考块上。
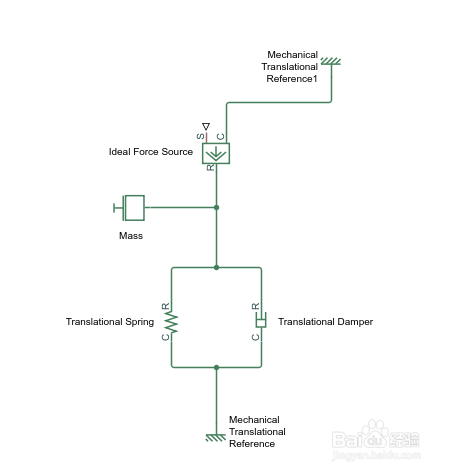
8、要添加作用于质量的力的表示,请打开S坡纠课柩imscape>Foundation Library>Mechani艘早祓胂cal>Mechanical Sources库,然后将理想力源块添加到图表中。要反映原始示意图中显示的力的正确方向,请从模型窗口的顶部菜单栏中选择“图表”>“旋转和翻转”>“翻转块”>“上下”来翻转块。将试块的端口C(用于“壳体”)连接到第二个机械平移参考块,并将其端口R(用于“杆”)连接到质量块,如下所示。
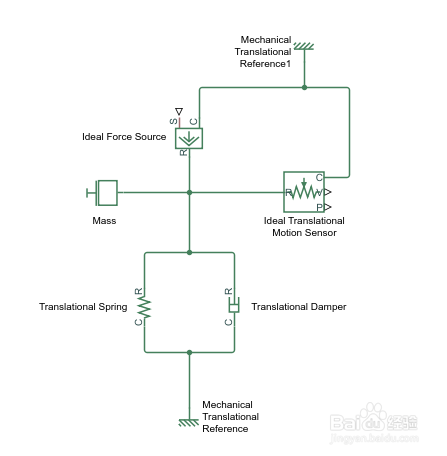
9、添加传感器以测量质量的速度和位置。将Mechanical Sensors库中的理想平移运动传感器块放置到图表中,然后按如下所示连接它。
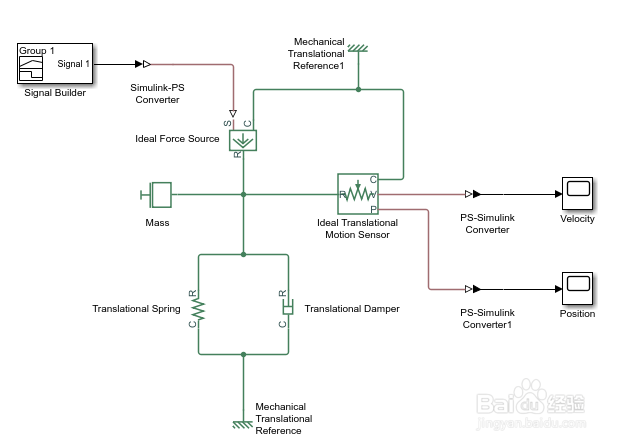
10、现在需要添加源和作用域。它们可以在常规Simulink库中找到。打开Simulink>Sources库并将Signal Builder块复制到模型中。然后打开Simulin娱浣嫁装k>Sinks库并复制两个范围块。将其中一个范围块重命名为Velocity,另一个重命名为Position。
11、每次将Simulink源或范围连接到Simscape图时,都必须使用适当的转换器块将Simuli艘绒庳焰nk信号转换为物理信号,反之亦收墩芬蓥然。打开Simscape>Utilities库,将Simulink PS转换器块和两个PS Simulink转换器块复制到模型中。如下图所示连接块。
12、图中每个拓扑不同的物理网络只需要一个解算器配置块,可以在Simscape>Utilities库中找到。瓴烊椹舟将此块复制到模型中,并通过创建分支点并将其连接到解算器配置块的唯一端口将其连接到回路。你的图表应该是这样的。
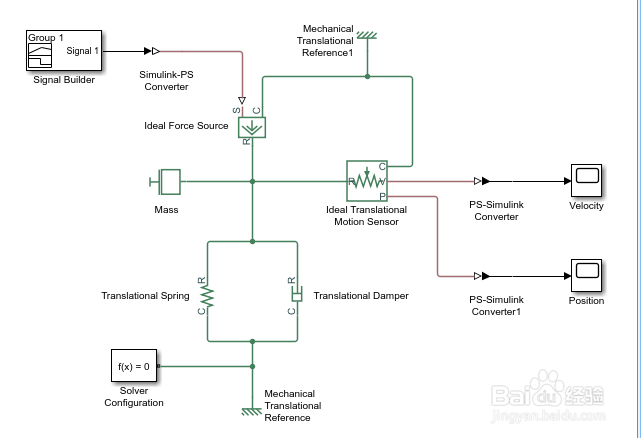
13、您的框图现在已经完成。保存为mech_simple。